1概述第四章伺服系统技术一、伺服系统基本概念伺服传动技术(伺服控制,伺服系统)是指在控制指令的指挥下,控制驱动执行机构,使机械系统的运动部件按照指令要求进行运动
实现执行机构对给定指令的准确跟踪,即实现输出变量的某种状态能够自动,连续,精确的复现输入指令信号的变化规律
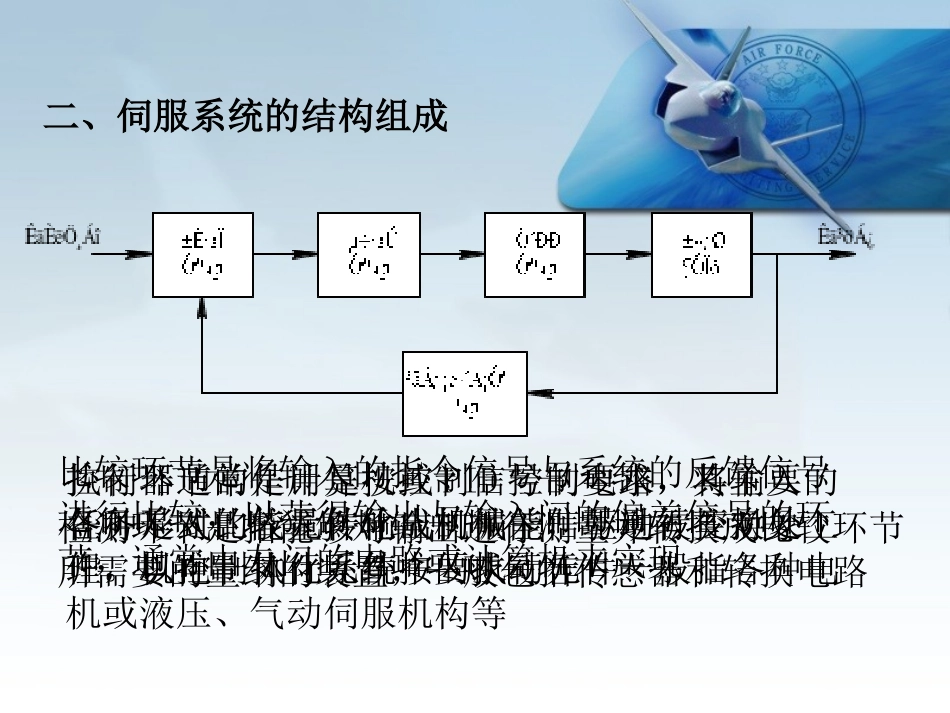
二、伺服系统的结构组成比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路三、伺服系统基本类型采用不同的分类方法,可以得采用不同的分类方法,可以得到不同类型的伺服系统到不同类型的伺服系统按控制原理(或方式)不同按控制原理(或方式)不同表示的方式有开环、闭环和半闭环三种形式按被控制量性质不同按被控制量性质不同有位移、速度、力和力矩等伺服系统形式按驱动方式不同有电气、液压和气压等伺服驱动形式按执行元件不同分为步进电机伺服、直流电机伺服和交流电机伺服形式四、伺服系统基本要求精度高精度高响应速度快响应速度快指输出量复现输入指令信号指输出量复现输入指令信号的精确程度,通常用稳态误差表示的精确程度,通常用稳态误差表示影响伺服系统精度的因素:影响伺服系统精度的因素:11、组成元件本、组成元件本身误差身误差传感器的灵敏度和精度传感器的灵敏度和精度伺服放大器的零点漂移和死区误差伺服放大器的零点漂移和死区误差机械装置反向间隙和传动误差机械装置反向间隙和传动误差各元器件的非线性因素等各元器件的非线性因素等22、系统本