智能搬运小车摘要:设计一个轮式小型机器人,在比赛场地里移动,将不同颜色、形状或者材质的物体分类搬运到不同的对应位置
比赛的记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低
它模拟了工业自动化过程中自动化物流系统实际工作过程
关键词:单片机,PWM,光电传感器,运货小车1
1智能搬运小车研究的背景和目的:运货是各个行业不可或缺的过程,人工运货随着经济的快速发展,不能完全满足市场的需求
世界上许多国家都在积极进行智能车辆的研究和开发设计
移动机器人是机器人学中的一个重要分支,出现于20世纪60年代
当时斯坦福研究院的NilsNilssen和charlesRosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注
智能搬运小车可以安装不同的末端以完成各种不同形状和状态的工件搬运工作,可以广泛应用于机床上下料,冲压机自动化生产线,自动装配流水线,码垛搬运,集装箱等的自动搬运,大大减轻了人类繁重的体力劳动,具有广阔的市场前景
2智能搬运小车的功能介绍:智能搬运小车希望能够希望得到可以自动抓取货物,循迹行进,自动卸货物的功能
总体方案及论证2
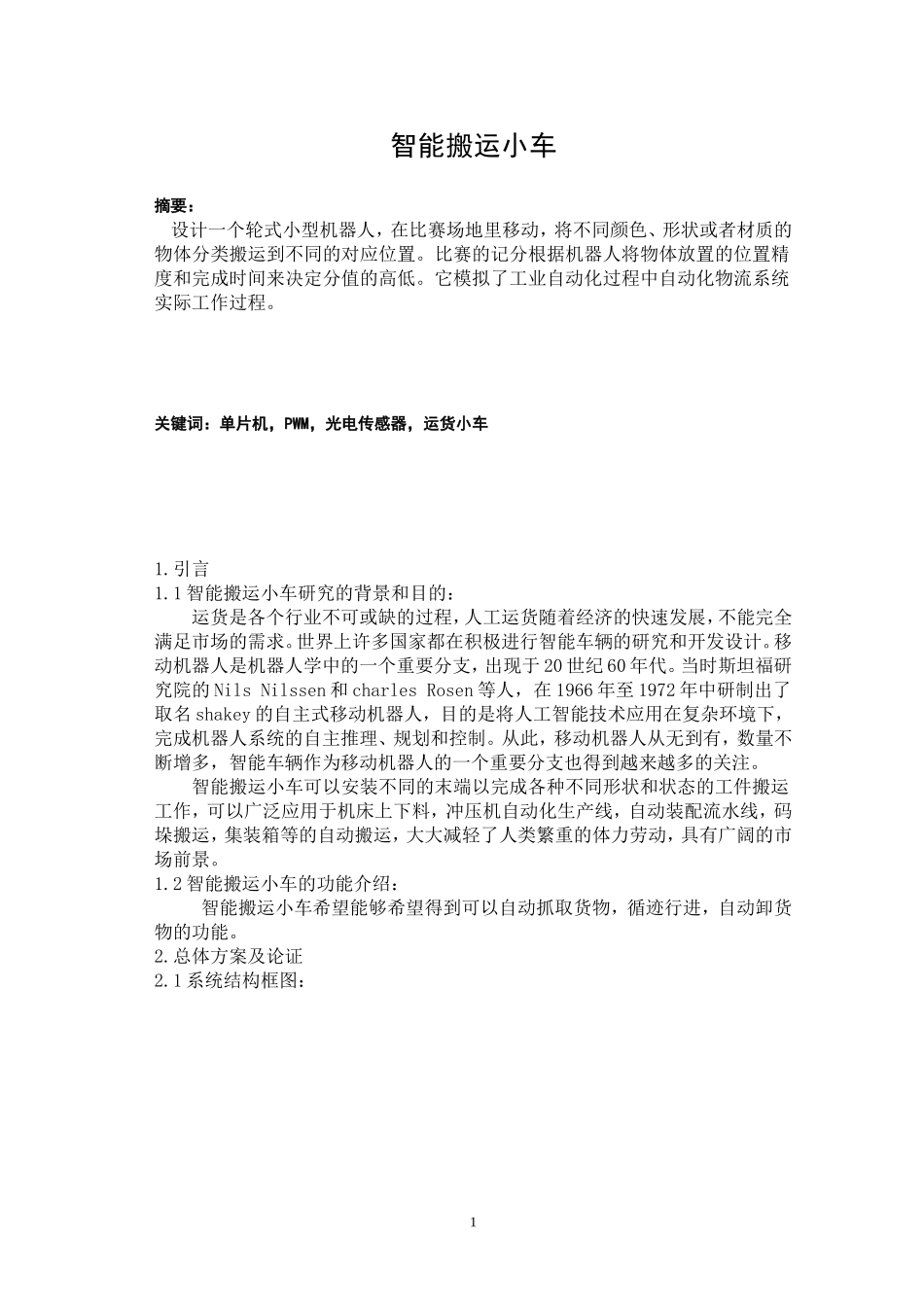
1系统结构框图:1图1
系统结构框图2
2具体设计:整个系统包括单片机控制模块、电机驱动模块、光电传感器模块、机械手模块、模拟电源模块、小车车体
将单片机控制模块,驱动模块固定在小车上端;光电电传感器安装在小车底部;将机械手安装在小车上部的前端
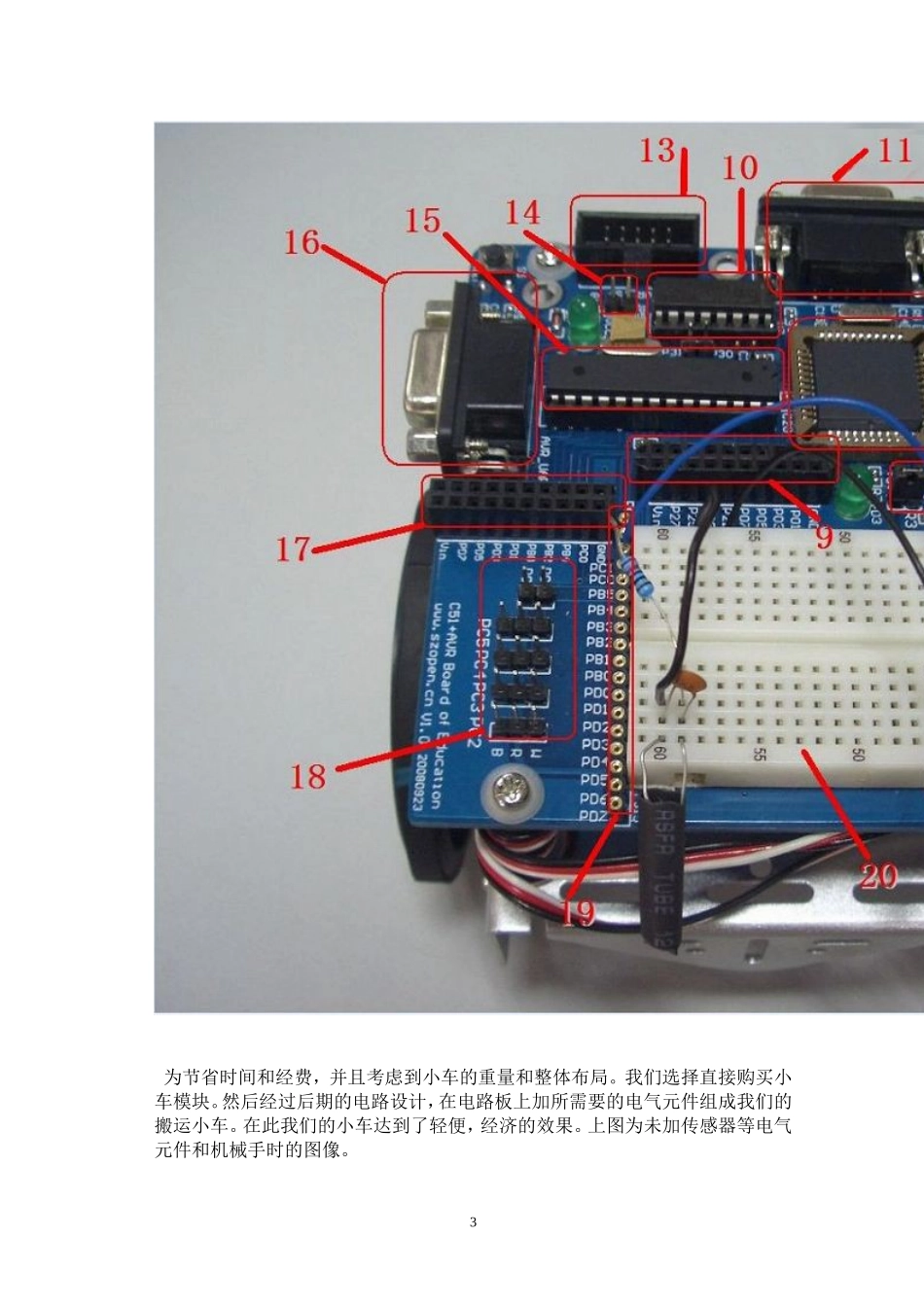
1系统布局部分2为节省时间和经费,并且考虑到小车的重量和整体布局
我们选择直接购买小车模块
然后经过后期的电路设计,在电路板上加所需要的电气元件组成我们的搬运小车