第7期2012年7月组合机床与自动化加工技术ModularMachineTool&AutomaticManufacturingTechniqueNo.7Jul.2012文章编号:1001-2265(2012)07-0033-06收稿日期:2011-12-13;修回日期:2012-02-02*基金项目:863重点攻关项目(2009AA043903)搬运工业机器人产业化作者简介:曹波(1986—),男,江西人,上海交通大学机械与动力工程学院硕士研究生,研究方向为工业机器人运动控制,(E-mail)hbwh-hk123@163.com
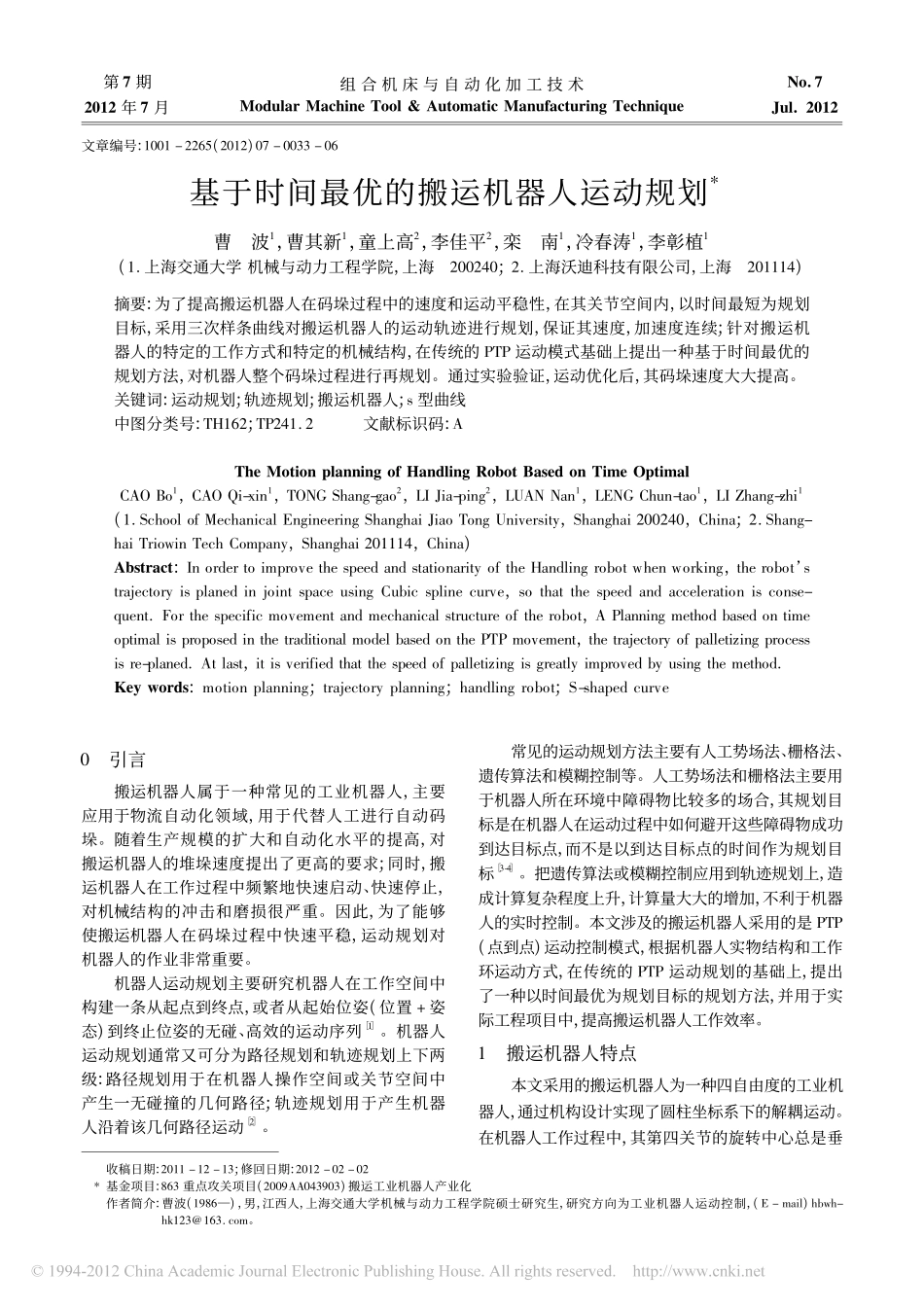
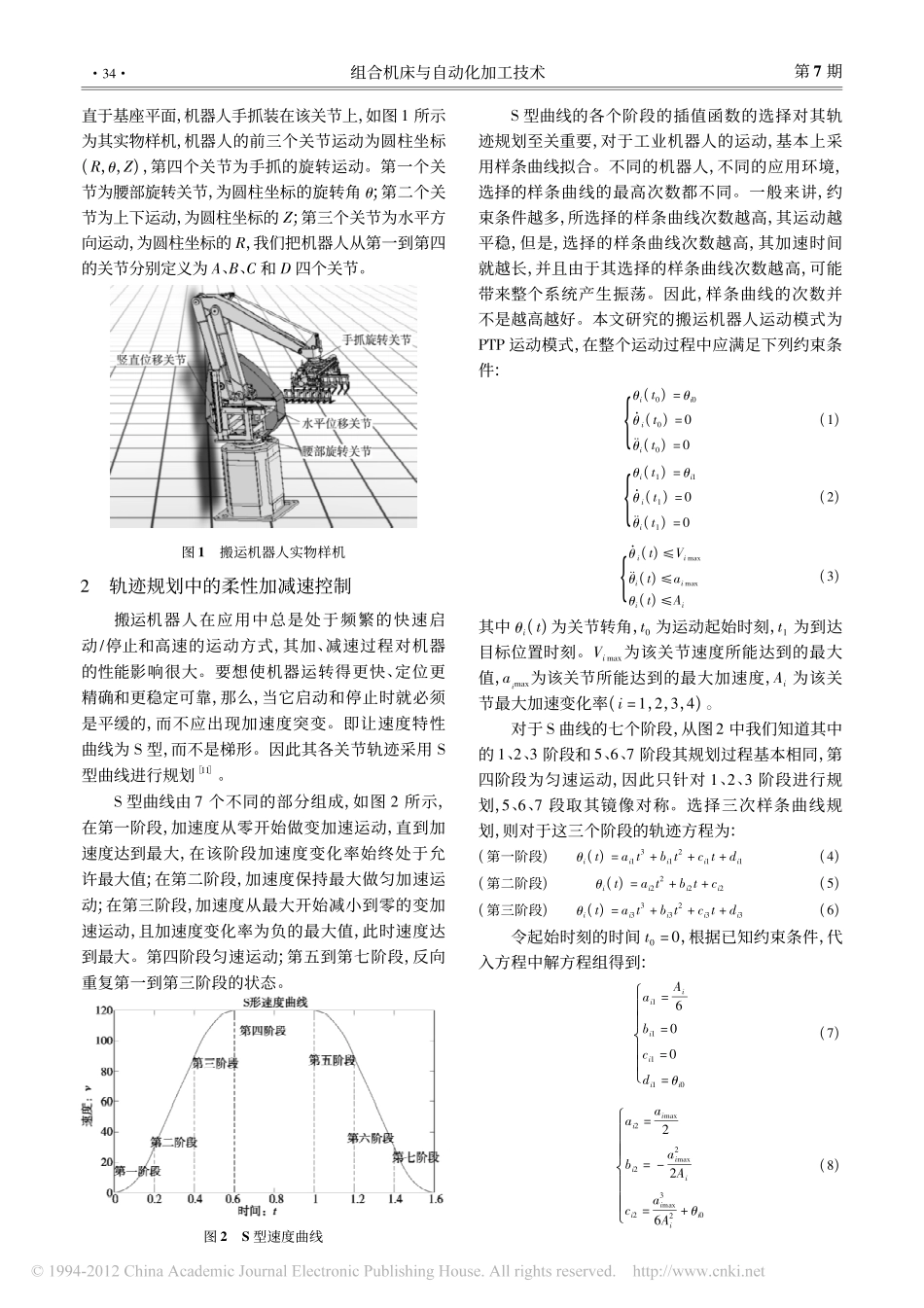
基于时间最优的搬运机器人运动规划*曹波1,曹其新1,童上高2,李佳平2,栾南1,冷春涛1,李彰植1(1.上海交通大学机械与动力工程学院,上海200240;2.上海沃迪科技有限公司,上海201114)摘要:为了提高搬运机器人在码垛过程中的速度和运动平稳性,在其关节空间内,以时间最短为规划目标,采用三次样条曲线对搬运机器人的运动轨迹进行规划,保证其速度,加速度连续;针对搬运机器人的特定的工作方式和特定的机械结构,在传统的PTP运动模式基础上提出一种基于时间最优的规划方法,对机器人整个码垛过程进行再规划
通过实验验证,运动优化后,其码垛速度大大提高
关键词:运动规划;轨迹规划;搬运机器人;s型曲线中图分类号:TH162;TP241.2文献标识码:ATheMotionplanningofHandlingRobotBasedonTimeOptimalCAOBo1,CAOQi-xin1,TONGShang-gao2,LIJia-ping2,LUANNan1,LENGChun-tao1,LIZhang-zhi1(1.SchoolofMechanicalEngineeringShanghaiJiaoTongUniversity,Shanghai200240,Chi