第五章极点配置与观测器设计5
2单输入系统的极点配置5
3多输入系统的极点配置5
4观测器及其设计方法5
5用状态观测器的反馈系统第一节概述一、问题的提出•系统的描述主要解决系统的建模、各种数学模型(时域、频域、内部、外部描述)之间的相互转换等;•系统的分析,则主要研究系统的定量变化规律(如状态方程的解,即系统的运动分析等)和定性行为(如能控性、能观测性、稳定性等)
•综合与设计问题则与此相反,即在已知系统结构和参数(被控系统数学模型)的基础上,寻求控制规律,以使系统具有某种期望的性能
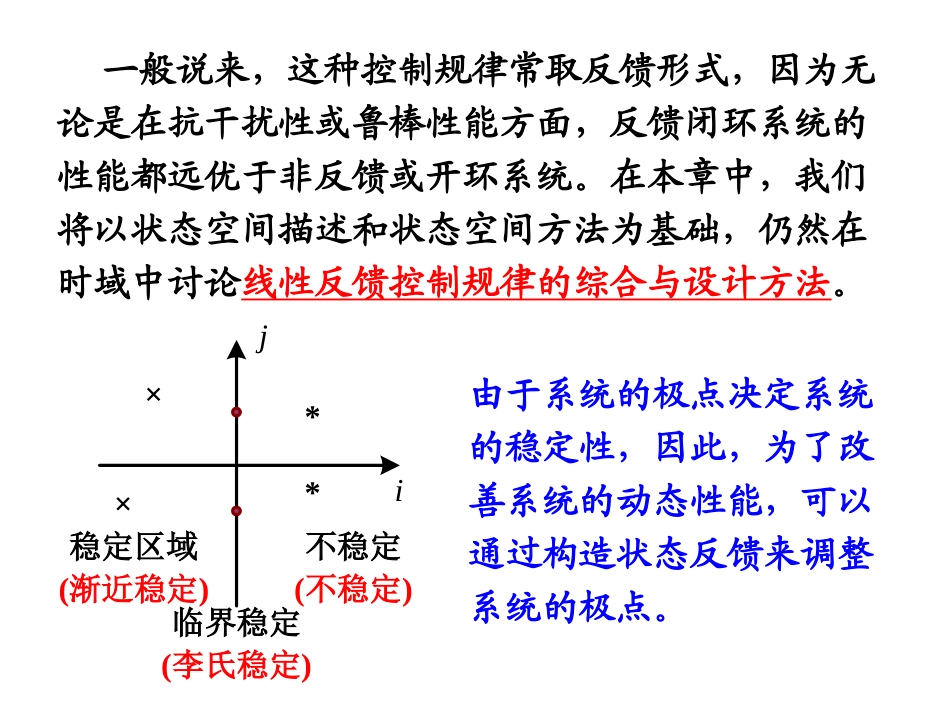
一般说来,这种控制规律常取反馈形式,因为无论是在抗干扰性或鲁棒性能方面,反馈闭环系统的性能都远优于非反馈或开环系统
在本章中,我们将以状态空间描述和状态空间方法为基础,仍然在时域中讨论线性反馈控制规律的综合与设计方法
由于系统的极点决定系统的稳定性,因此,为了改善系统的动态性能,可以通过构造状态反馈来调整系统的极点
ij×**×稳定区域(渐近稳定)不稳定(不稳定)临界稳定(李氏稳定)CxyBvxBKAxvACB)(ty)(tx)(txu二、状态反馈与输出反馈的形式KCxyBuAxx1
状态反馈vKxu反馈规律开环系统:状态反馈后的闭环系统:开环极点:A0AsI闭环极点:BKA0BKAsICxyBuxHCABuHyAxxACB)(ty)(tu)(tx)(txH2
输出反馈问题:1
状态反馈会不会改变系统的能控性
状态反馈会不会改变系统的能观性
是否所有的系统都可以通过状态反馈任意配置极点
若不可以,什么条件下,可任意配置极点
什么条件下,不可任意配置极点
不能任意配置极点时,能否部分配置极点使闭环稳定
如何实现状态反馈
定理5-1:开环系统完全能控经过状态反馈后