异步电机动直接转矩控制基本原理异步电动机直接转矩控制基本原理从1985年德国鲁尔大学德彭布洛克(Depenbrock)教授首次提出直接转矩控制理论以来,短短十几年时间,直接转矩控制理论以它简明的系统结构,优良的静、动态性能得到迅猛发展和应用
1异步电动机的数学模型异步电机数学模型是一个高阶、强耦合、多变量、非线性系统
理想状态下(一般这样假设)电机三相(定、转子)均对称,定、转子表面光滑,无齿槽效应,电机气隙磁势在空间正弦分布,铁心涡流、饱和及磁滞损耗不计
在固定坐标系下(,,0),用异步电机转子的量来表示异步电机数学模型(则有==0)
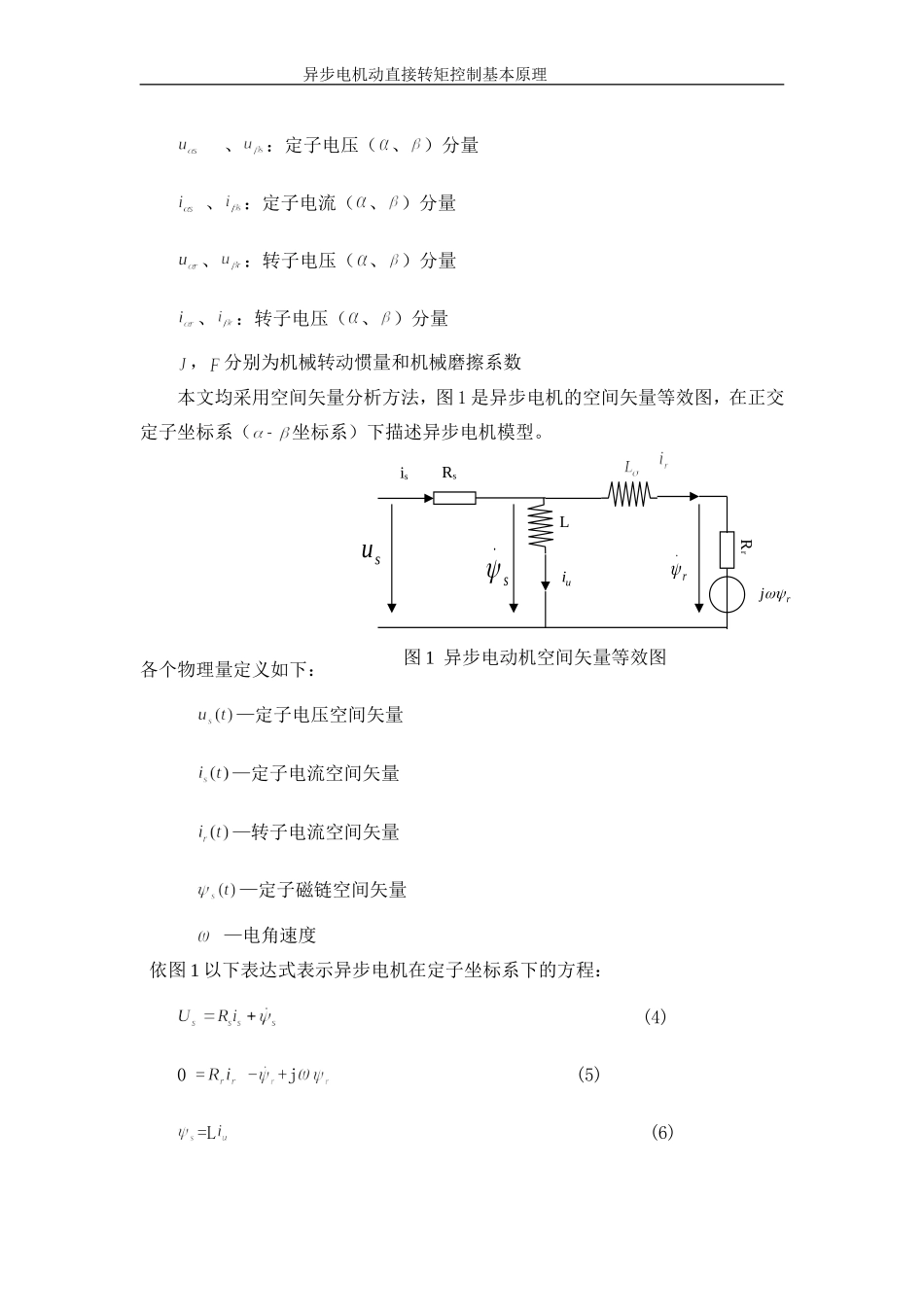
基本方程如下:(1)(2)(3)、:定子电阻和自感、:转子电阻和自感:定子互感:电机转子角速度,即机械角速度异步电机动直接转矩控制基本原理、:定子电压(、)分量、:定子电流(、)分量、:转子电压(、)分量、:转子电压(、)分量,分别为机械转动惯量和机械磨擦系数本文均采用空间矢量分析方法,图1是异步电机的空间矢量等效图,在正交定子坐标系(坐标系)下描述异步电机模型
各个物理量定义如下:—定子电压空间矢量—定子电流空间矢量—转子电流空间矢量—定子磁链空间矢量—电角速度依图1以下表达式表示异步电机在定子坐标系下的方程:(4)0=-+j(5)=L(6)isRsRrsurjLuir
图1异步电动机空间矢量等效图异步电机动直接转矩控制基本原理=-(7)定子旋转磁场输出功率为(下式表示定子旋转磁场的频率):P===(8)并且有=(9)把表达式(9)分解到()坐标下得:(10)(11)把式(10)和式(11)代入式(8)得转矩表达式:(12)从图1可得:,结合式(6)、式(7)得:(13)上式也可以表示成(为磁通角,即定子磁链与转子磁链之间的夹角):(14)定子磁链的幅值根据式(4)由定子电压积分来计算的,而转子磁链幅值由负载决定的,它根据式(