了解掌握传统PID控制原理及其基本的参数整定方法;2
了解掌握模糊控制原理及其优缺点;3
了解掌握神经网络原理及其优缺点;4
掌握将传统PID控制与模糊控制结合、传统PID控制与神经网络控制结合以及将传统PID控制、模糊控制与神经网络控制三者结合起来有效地解决控制问题
分别改变PID参数中的Kp,Ti,Td,比较PID参数对控制系统的影响;2
选取Ziegler-Nichols法则对传统PID经行参数整定;3
选取合适的隶属度函数设计模糊控制PID;4
选取一种合适方式,设计神经网络与模糊控制结合的PID控制器
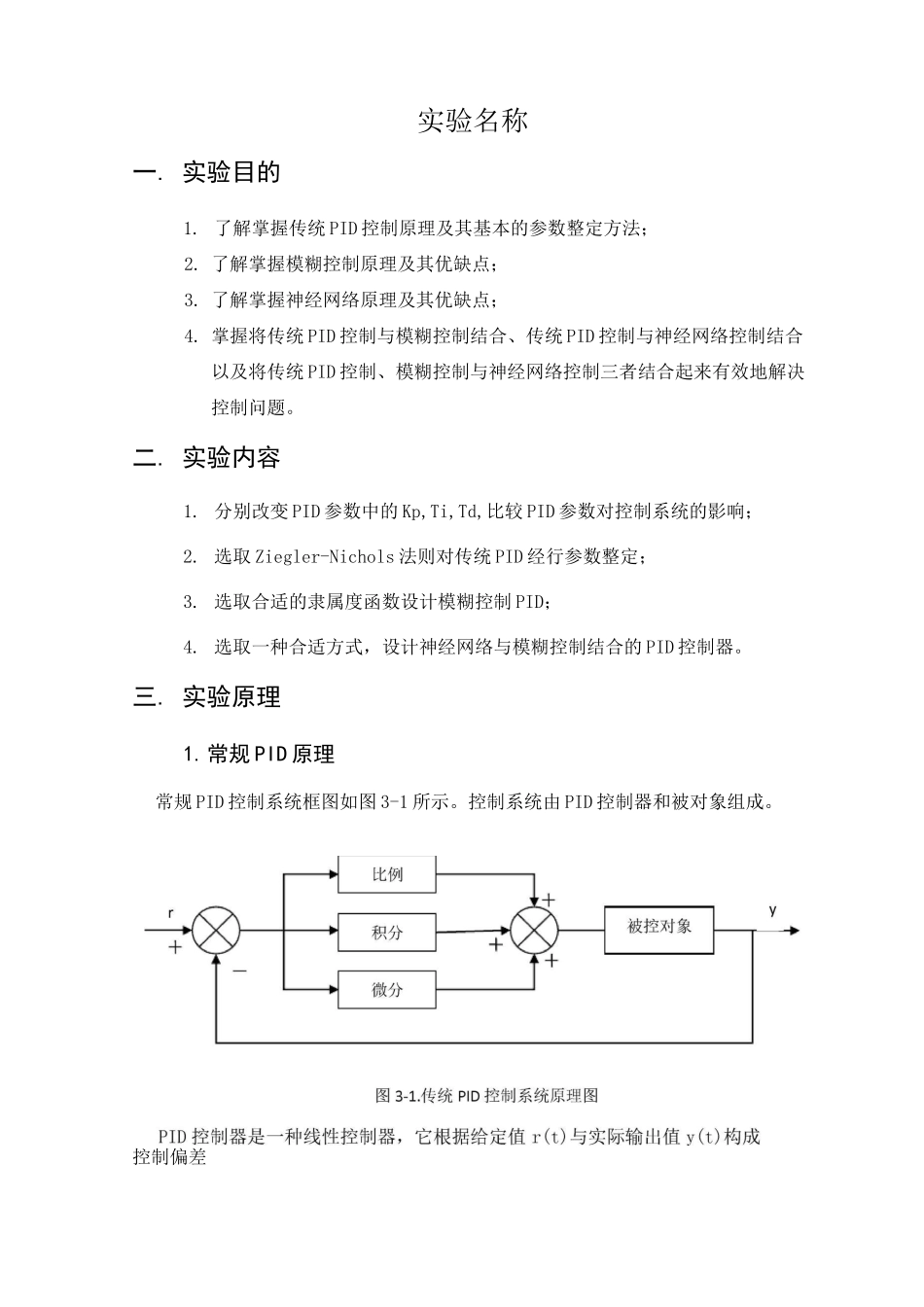
常规PID原理常规PID控制系统框图如图3-1所示
控制系统由PID控制器和被对象组成
控制偏差e(t)=r(t)一y(t)将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,其控制规律为u(t)=Kp(e(t)+——1——+TDde(t))TIf0e(t)dtdt或写成传递函数形式:G(s)=^5=Kp(1+点+◎式中:Kp比例系数;Ti积分时间常数;Td微分时间常数;2
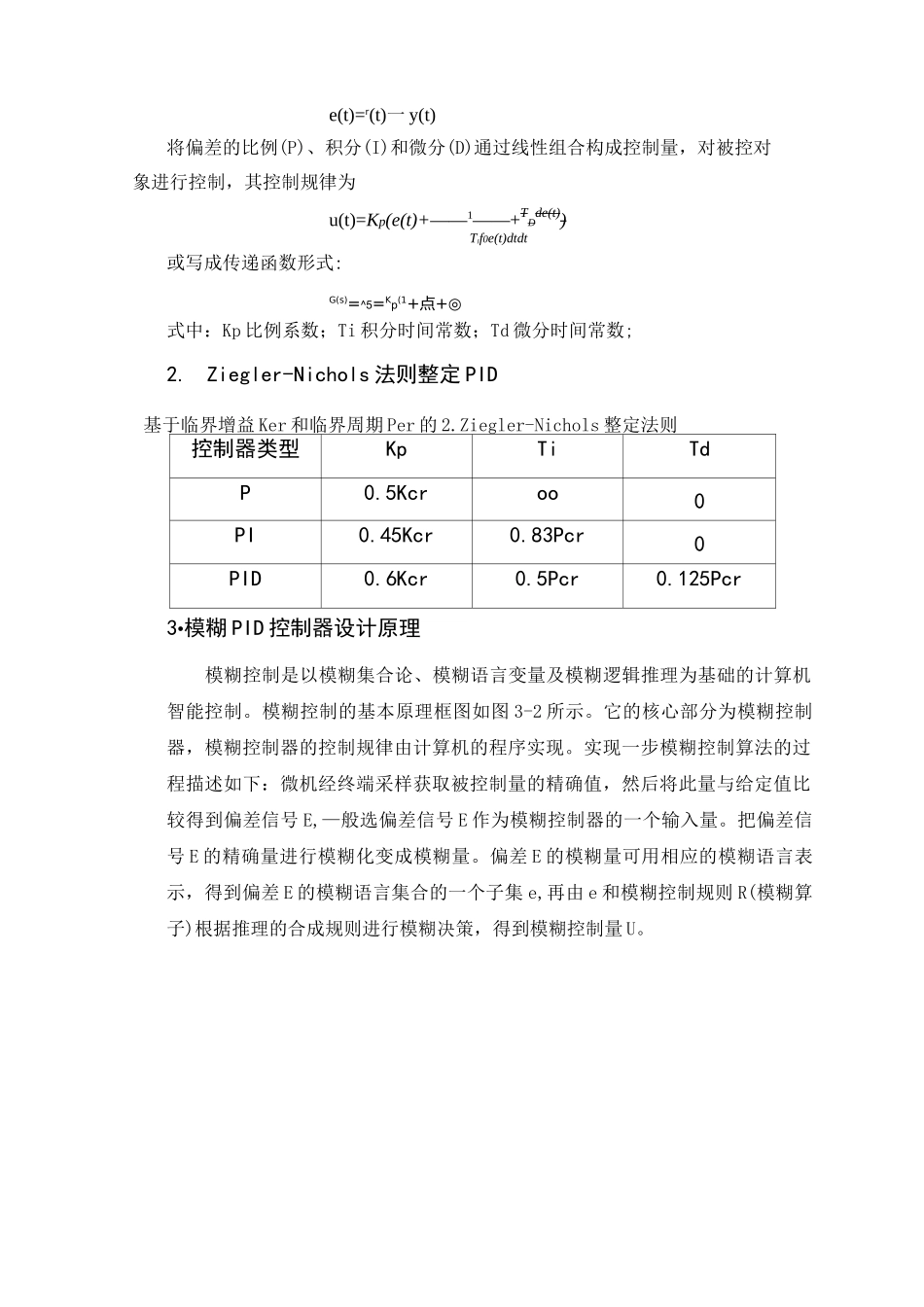
Ziegler-Nichols法则整定PID基于临界增益Ker和临界周期Per的2
Ziegler-Nichols整定法则控制器类型KpTiTdP0
5Kcroo0PI0
45Kcr0
83Pcr0PID0
125Pcr3•模糊PID控制器设计原理模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机智能控制
模糊控制的基本原理框图如图3-2所示
它的核心部分为模糊控制器,模糊控制器的控制规律由计算机的程序实现
实现一步模糊控制算法的过程描述如下:微机经终端采样获取被控制量的精确值,然后将此量与给定值比较得到偏差信号E,—般选偏差信号E作为模糊控制器的一个输入量