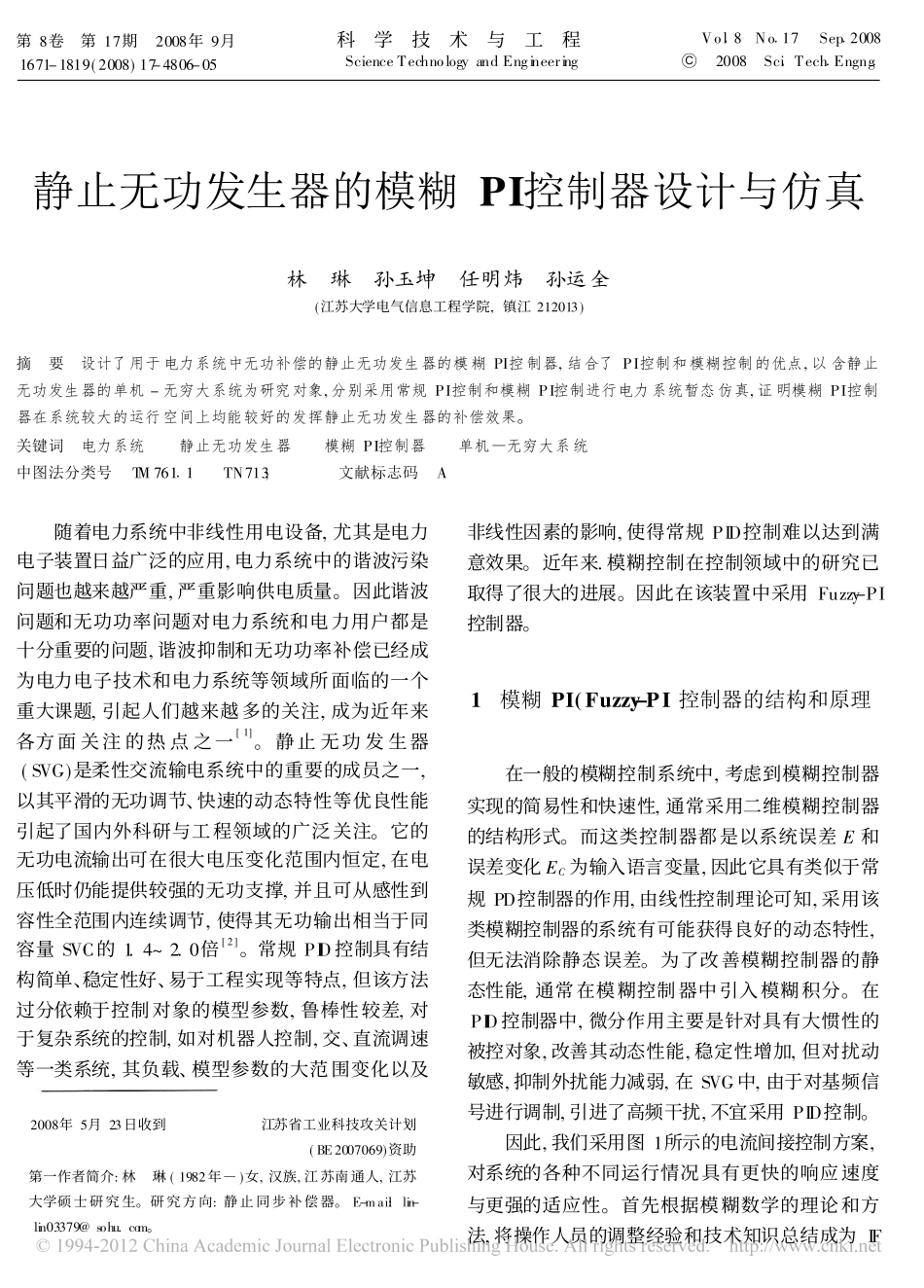
第8卷第17期2008年9月1671-1819(2008)17-4806-05科学技术与工程ScienceTechnologyandEngineeringVol18No117Sep12008Z2008Sci1Tech1Engng1静止无功发生器的模糊PI控制器设计与仿真林琳孙玉坤任明炜孙运全(江苏大学电气信息工程学院,镇江212013)摘要设计了用于电力系统中无功补偿的静止无功发生器的模糊PI控制器,结合了PI控制和模糊控制的优点,以含静止无功发生器的单机-无穷大系统为研究对象,分别采用常规PI控制和模糊PI控制进行电力系统暂态仿真,证明模糊PI控制器在系统较大的运行空间上均能较好的发挥静止无功发生器的补偿效果。关键词电力系统静止无功发生器模糊PI控制器单机)无穷大系统中图法分类号TM76111TN713;文献标志码A2008年5月23日收到江苏省工业科技攻关计划(BE2007069)资助第一作者简介:林琳(1982年))女,汉族,江苏南通人,江苏大学硕士研究生。研究方向:静止同步补偿器。E-mai:llin-lin03379@sohu.com。随着电力系统中非线性用电设备,尤其是电力电子装置日益广泛的应用,电力系统中的谐波污染问题也越来越严重,严重影响供电质量。因此谐波问题和无功功率问题对电力系统和电力用户都是十分重要的问题,谐波抑制和无功功率补偿已经成为电力电子技术和电力系统等领域所面临的一个重大课题,引起人们越来越多的关注,成为近年来各方面关注的热点之一[1]。静止无功发生器(SVG)是柔性交流输电系统中的重要的成员之一,以其平滑的无功调节、快速的动态特性等优良性能引起了国内外科研与工程领域的广泛关注。它的无功电流输出可在很大电压变化范围内恒定,在电压低时仍能提供较强的无功支撑,并且可从感性到容性全范围内连续调节,使得其无功输出相当于同容量SVC的1.4~2.0倍[2]。常规PID控制具有结构简单、稳定性好、易于工程实现等特点,但该方法过分依赖于控制对象的模型参数,鲁棒性较差,对于复杂系统的控制,如对机器人控制,交、直流调速等一类系统,其负载、模型参数的大范围变化以及非线性因素的影响,使得常规PID控制难以达到满意效果。近年来.模糊控制在控制领域中的研究已取得了很大的进展。因此在该装置中采用Fuzzy-PI控制器。1模糊PI(Fuzzy-PI)控制器的结构和原理在一般的模糊控制系统中,考虑到模糊控制器实现的简易性和快速性,通常采用二维模糊控制器的结构形式。而这类控制器都是以系统误差E和误差变化EC为输入语言变量,因此它具有类似于常规PD控制器的作用,由线性控制理论可知,采用该类模糊控制器的系统有可能获得良好的动态特性,但无法消除静态误差。为了改善模糊控制器的静态性能,通常在模糊控制器中引入模糊积分。在PID控制器中,微分作用主要是针对具有大惯性的被控对象,改善其动态性能,稳定性增加,但对扰动敏感,抑制外扰能力减弱,在SVG中,由于对基频信号进行调制,引进了高频干扰,不宜采用PID控制。因此,我们采用图1所示的电流间接控制方案,对系统的各种不同运行情况具有更快的响应速度与更强的适应性。首先根据模糊数学的理论和方法,将操作人员的调整经验和技术知识总结成为IF图1Fuzzy-PI控制器的结构图(条件)THEN(结果)形式的模糊规则,并把这些模糊规则及相关信息(如初始的PI参数)存入计算机中。根据SVG的响应情况,计算出采样时刻无功电流与其给定量的偏差e及偏差的变化率ec,输人控制器,运用模糊推理,进行模糊运算,即可得到该时刻的$Kp、$Ki,实现PI的最佳调整。Fuzzy-PI控制器主要由模糊化、模糊推理、去模糊化3部分组成。2Fuzzy-PI控制器的设计对于式i(n)=Kpe(n)+TKiEn-1i=0e(i)(1)(1)式中,i(n)、e(n)分别为第n个采样时刻控制器输出量(控制量)和输入量(偏差量);T为采样周期;Ki是积分时间常数;Kp为比例增益。由上式可以得到控制器输出第n个周期时刻的控制量i(n)和第n-1个周期时刻i(n-1)之间的增量为$i(n)=i(n)-i(n-1)=Kpe(n)-e(n-1)+(T/Ki)e(n)(2)这是一个增量算式,它只与前n次采样值有关,计算量少而实时性强。但它与模拟PI控制器一样,存在参数修改不方便、更不能进行调整等缺点。如果能实现PI控制器的参数在线整定,那么就进一步完善了PI控制器自适应性能。Fuzzy-PI控制器是在PI参数预整定的基础上,利用模糊规则实时在线整定PI控制器的2个修正参数$Kp,$Ki,实现对SVG的优化...