实验报告线性系统的状态反馈及极点配置一.实验要求了解和掌握状态反馈的原理,观察和分析极点配置后系统的阶跃响应曲线
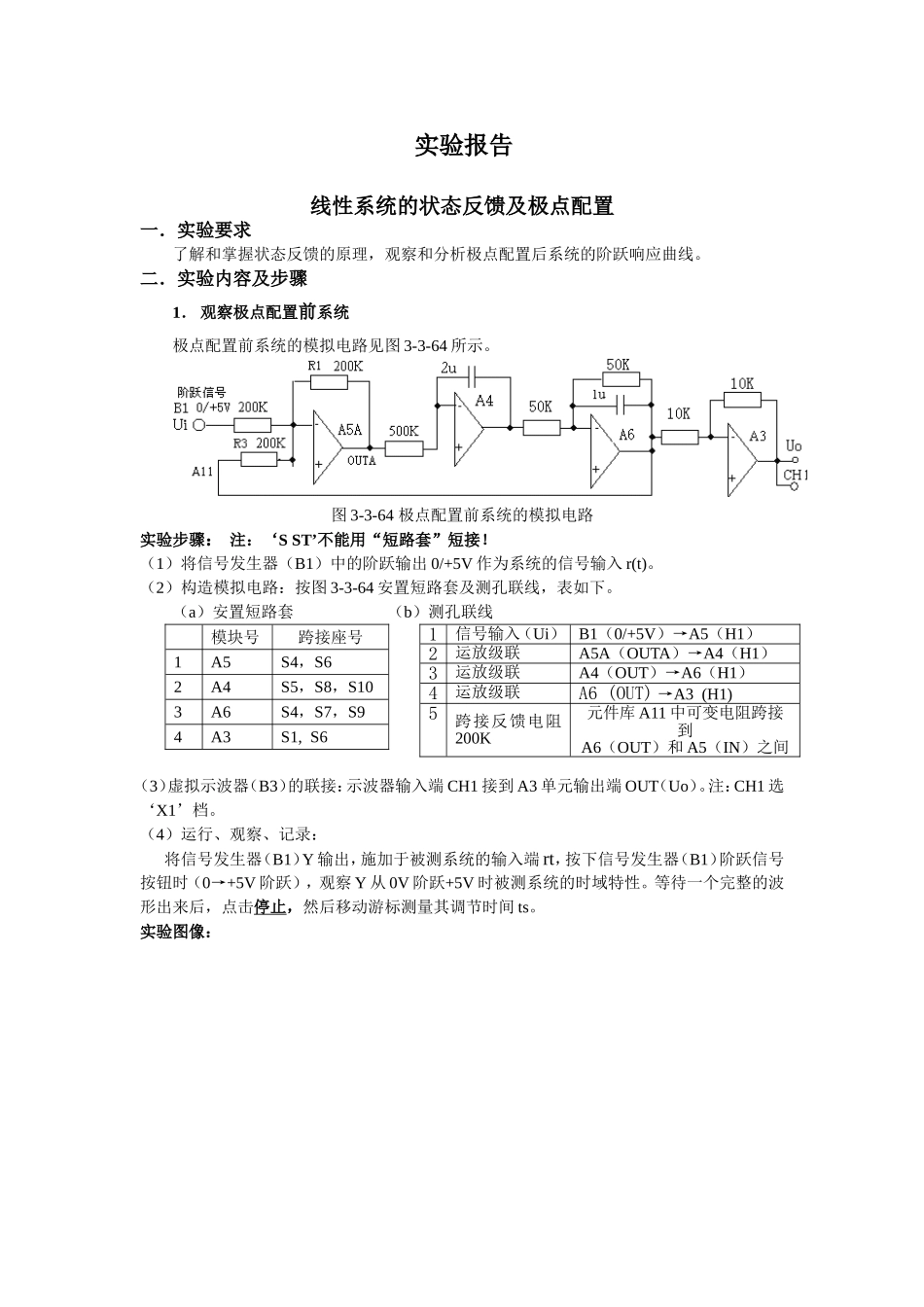
二.实验内容及步骤1.观察极点配置前系统极点配置前系统的模拟电路见图3-3-64所示
图3-3-64极点配置前系统的模拟电路实验步骤:注:‘SST’不能用“短路套”短接
(1)将信号发生器(B1)中的阶跃输出0/+5V作为系统的信号输入r(t)
(2)构造模拟电路:按图3-3-64安置短路套及测孔联线,表如下
(a)安置短路套(b)测孔联线模块号跨接座号1A5S4,S62A4S5,S8,S103A6S4,S7,S94A3S1,S6(3)虚拟示波器(B3)的联接:示波器输入端CH1接到A3单元输出端OUT(Uo)
注:CH1选‘X1’档
(4)运行、观察、记录:将信号发生器(B1)Y输出,施加于被测系统的输入端rt,按下信号发生器(B1)阶跃信号按钮时(0→+5V阶跃),观察Y从0V阶跃+5V时被测系统的时域特性
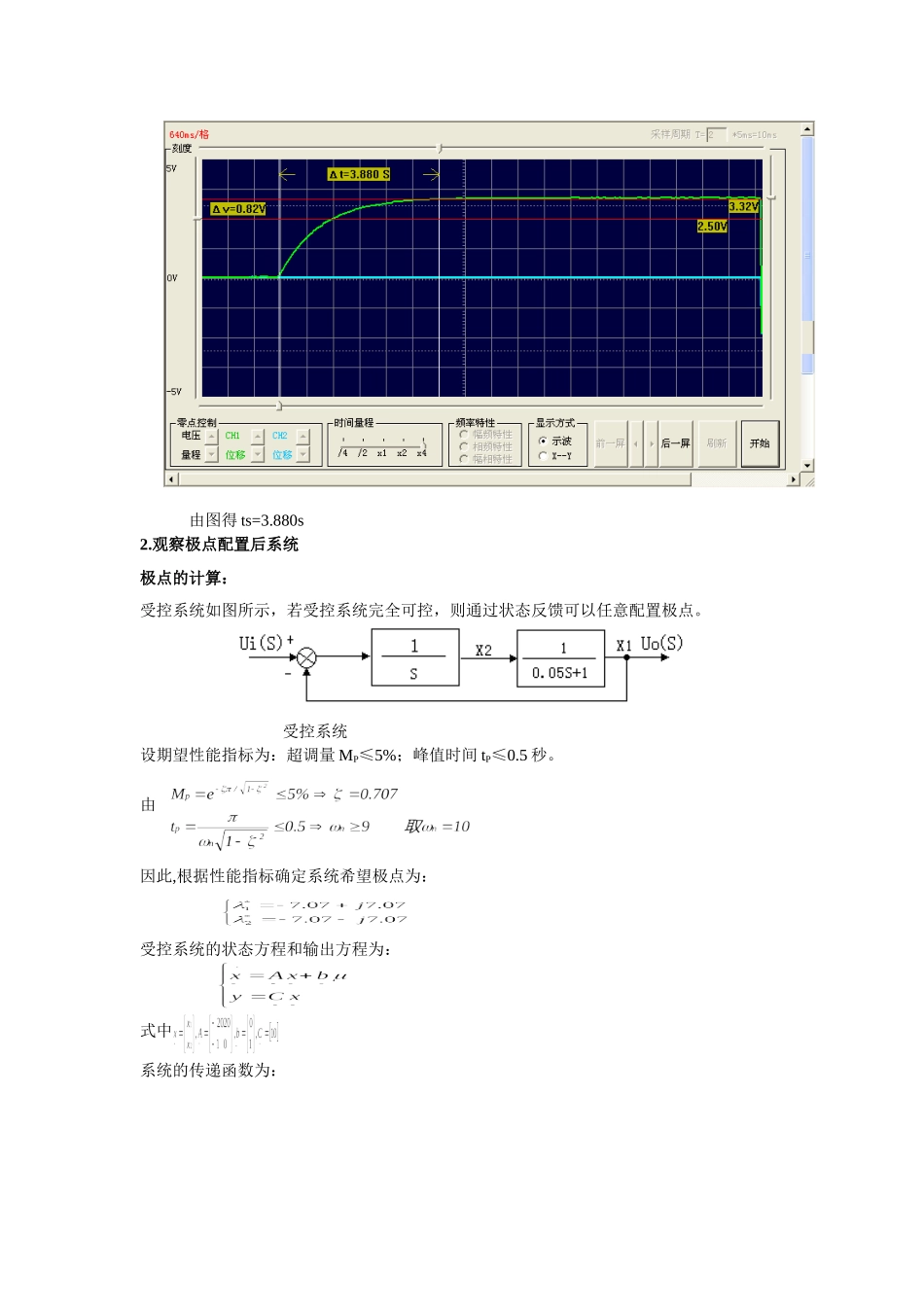
等待一个完整的波形出来后,点击停止,然后移动游标测量其调节时间ts
实验图像:1信号输入(Ui)B1(0/+5V)→A5(H1)2运放级联A5A(OUTA)→A4(H1)3运放级联A4(OUT)→A6(H1)4运放级联A6(OUT)→A3(H1)5跨接反馈电阻200K元件库A11中可变电阻跨接到A6(OUT)和A5(IN)之间由图得ts=3
观察极点配置后系统极点的计算:受控系统如图所示,若受控系统完全可控,则通过状态反馈可以任意配置极点
受控系统设期望性能指标为:超调量MP≤5%;峰值时间tP≤0
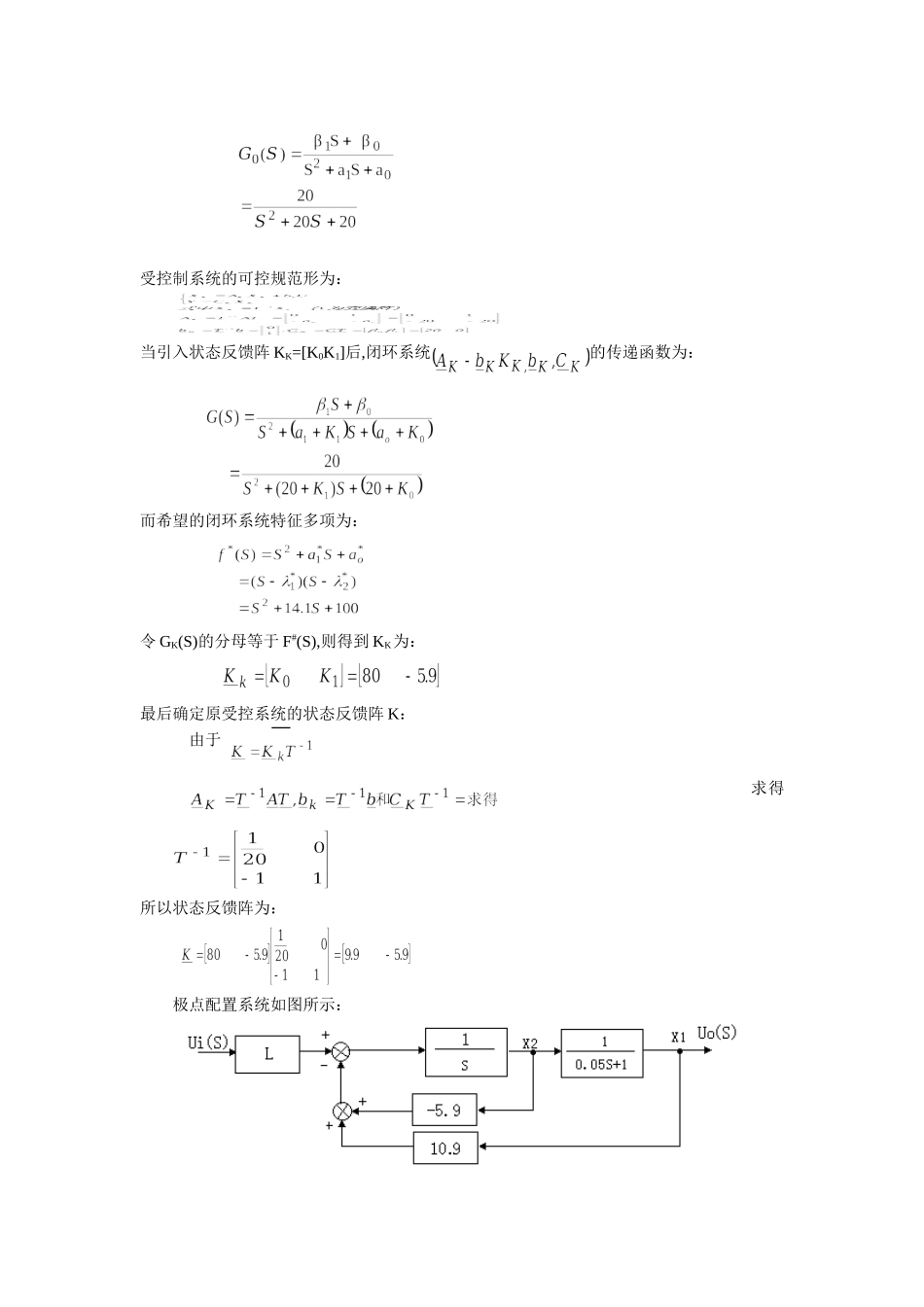
由因此,根据性能指标确定系统希望极点为:受控系统的状态方程和输出方程为:式中系统的传递函数为:受控制系统的可控规范形为:当引入状态反馈阵KK=[K0K1]后,闭环系统的传递函数为:而希望的闭环系统特征多项为:令GK(S)的分母等于F#(S)