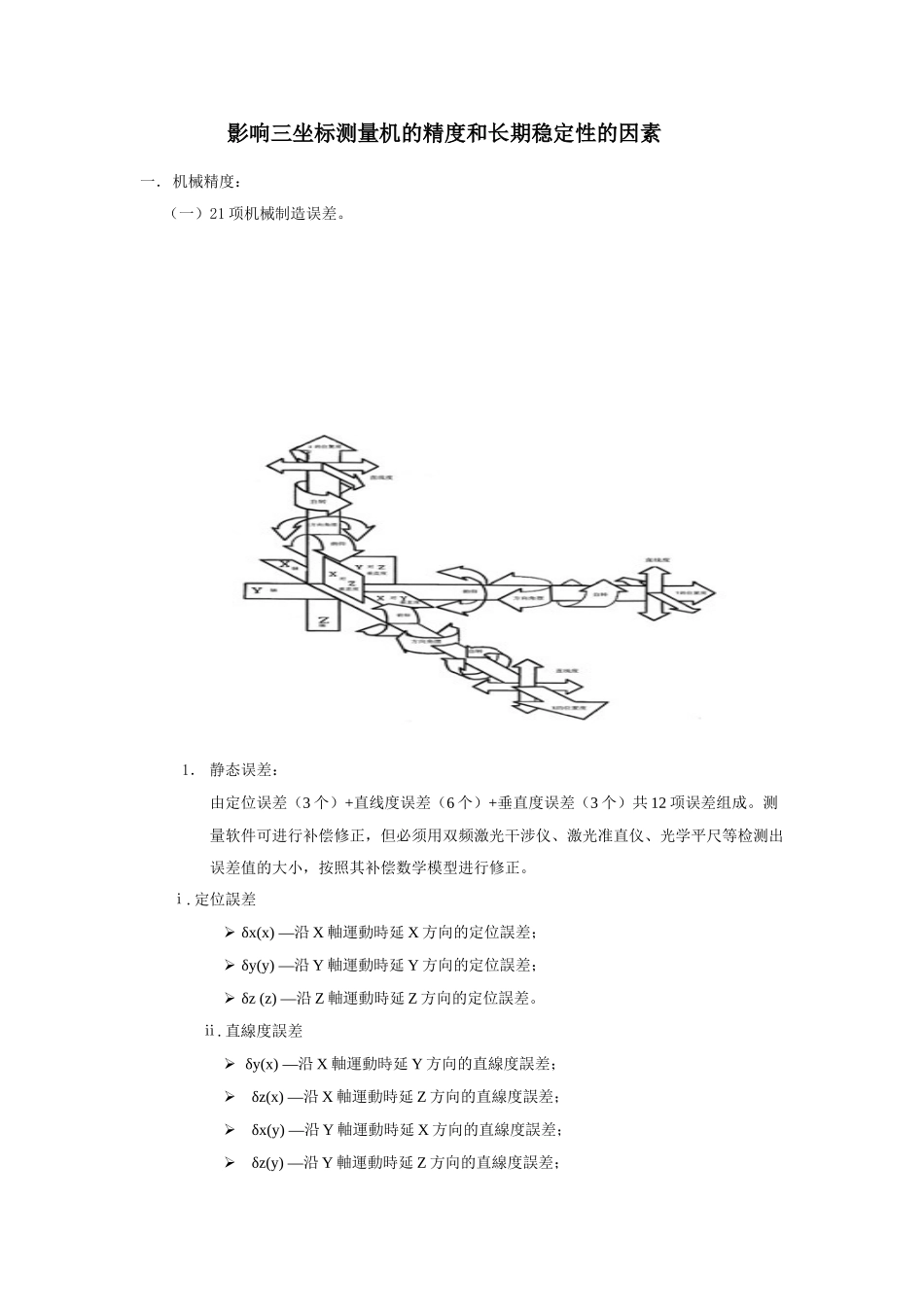
影响三坐标测量机的精度和长期稳定性的因素一.机械精度:(一)21项机械制造误差
1.静态误差:由定位误差(3个)+直线度误差(6个)+垂直度误差(3个)共12项误差组成
测量软件可进行补偿修正,但必须用双频激光干涉仪、激光准直仪、光学平尺等检测出误差值的大小,按照其补偿数学模型进行修正
定位誤差δx(x)—沿X軸運動時延X方向的定位誤差;δy(y)—沿Y軸運動時延Y方向的定位誤差;δz(z)—沿Z軸運動時延Z方向的定位誤差
直線度誤差δy(x)—沿X軸運動時延Y方向的直線度誤差;δz(x)—沿X軸運動時延Z方向的直線度誤差;δx(y)—沿Y軸運動時延X方向的直線度誤差;δz(y)—沿Y軸運動時延Z方向的直線度誤差;δx(z)—沿Z軸運動時延X方向的直線度誤差;δy(z)—沿Z軸運動時延Y方向的直線度誤差
垂直度誤差αxy—X、Y軸間的垂直度誤差;αxz—X、Z軸間的垂直度誤差;αyz—Y、Z軸間的垂直度誤差
2.动态误差:由滚转误差(3个)+俯仰误差(4个)+偏摆误差(2个)共9项误差组成
测量软件可进行补偿修正;但必须用双频激光干涉仪、激光准直仪、电子水平仪等检测出误差值的大小,按照其补偿数学模型进行修正
轉度誤差(角运动誤差)εx(x)—沿X軸轉動時繞X方向的轉動誤差(滚转误差);εy(y)—沿Y軸轉動時繞Y方向的轉動誤差(滚转误差);εz(z)—沿Z軸轉動時繞Z方向的轉動誤差(滚转误差);εy(x)—沿X軸轉動時繞Y方向的轉動誤差(俯仰误差);εx(y)—沿Y軸轉動時繞X方向的轉動誤差(俯仰误差);εy(z)—沿Z軸轉動時繞Y方向的轉動誤差(俯仰误差);εx(z)—沿Z軸轉動時繞X方向的轉動誤差(俯仰误差);εz(x)—沿X軸轉動時繞Z方向的轉動誤差(偏摆误差);εz(y)—沿Y軸轉動時繞Z方向的轉動誤差(偏摆