2有约束情况下的拉格朗日方程讨论:受约束的多个质点在保守力场中的运动方程出发点:牛顿第二定律设:N个质点,质量和矢径分别是
牛顿运动方程:——3N个标量方程一般情况下,3N个方程并不独立
方程组不独立的原因:有约束的存在
约束的定义:力学系统在运动过程中受到的限制(包括对位置和速度的限制)
约束的作用:1.使力学系统的坐标之间发生关联而不全部独立;2.给力学系统施加约束反力
约束反力:约束总是通过一些外界物体(如轻杆、滑槽、软绳等)作用在所研究的系统中的质点上
在运动过程中,系统中的质点对这些外界物体有作用力,同时受到这些物体的反作用力,称为约束反力
由于约束反力的作用,使质点的坐标满足约束方程;约束反力随时间变化,不能预先知道,只能通过解运动方程求得
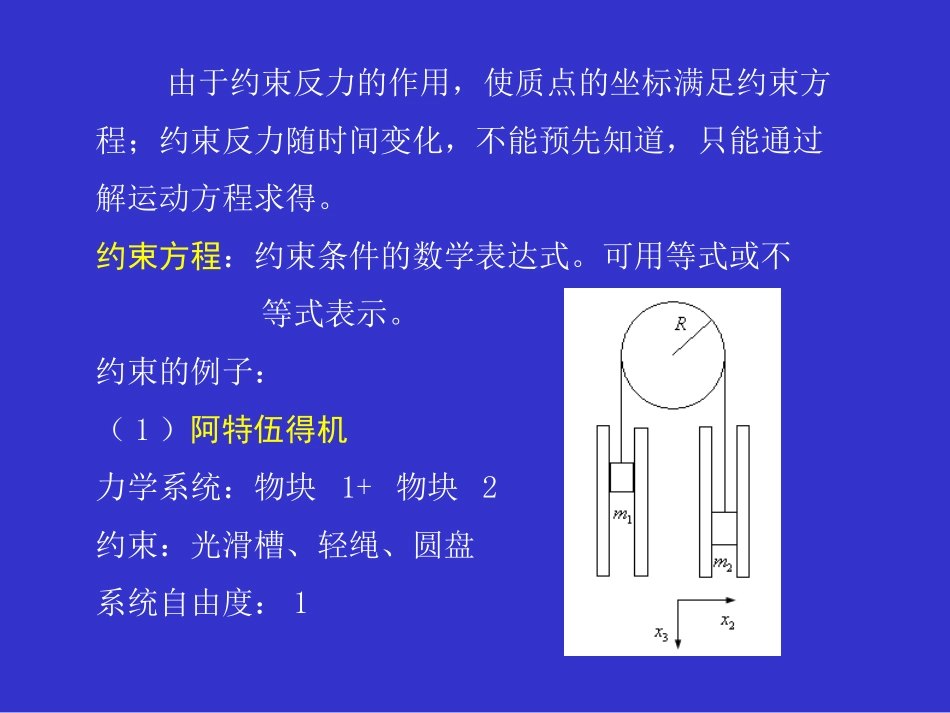
约束方程:约束条件的数学表达式
可用等式或不等式表示
约束的例子:(1)阿特伍得机力学系统:物块1+物块2约束:光滑槽、轻绳、圆盘系统自由度:1m1的坐标:;m2的坐标:——共6个坐标约束方程:(显示屏所在平面)——5个方程
(自由度=6-5=1)(2)单摆描述m的坐标:(不独立)约束方程:(两个独立)系统自由度:2——自由度数目少于坐标的数目N个质点的3N个笛卡尔坐标:若这些坐标满足3N-S个等式(约束方程):x:全部的独立方程的个数:3N-(3N-S)=S→力学体系只有S个独立坐标,即系统有S个自由度
约束的分类:1.约束方程中不含时间t——稳定约束2.约束方程中含时间t——不稳定约束3
由不等式表示的约束——可解约束4
由等式表示的约束——不可解约束约束的存在,使得力学系统的坐标不再独立→寻求独立坐标对于一个有S个自由度的力学系统,找到S个适合的变量,使3N个笛卡尔坐标是这S个变量的函数:以上函数关系满足约束方程,则这样的S个变量是决定系统中所有质点位置的独立变量,称为系统的广义坐标
广义坐标的引入解决了因约