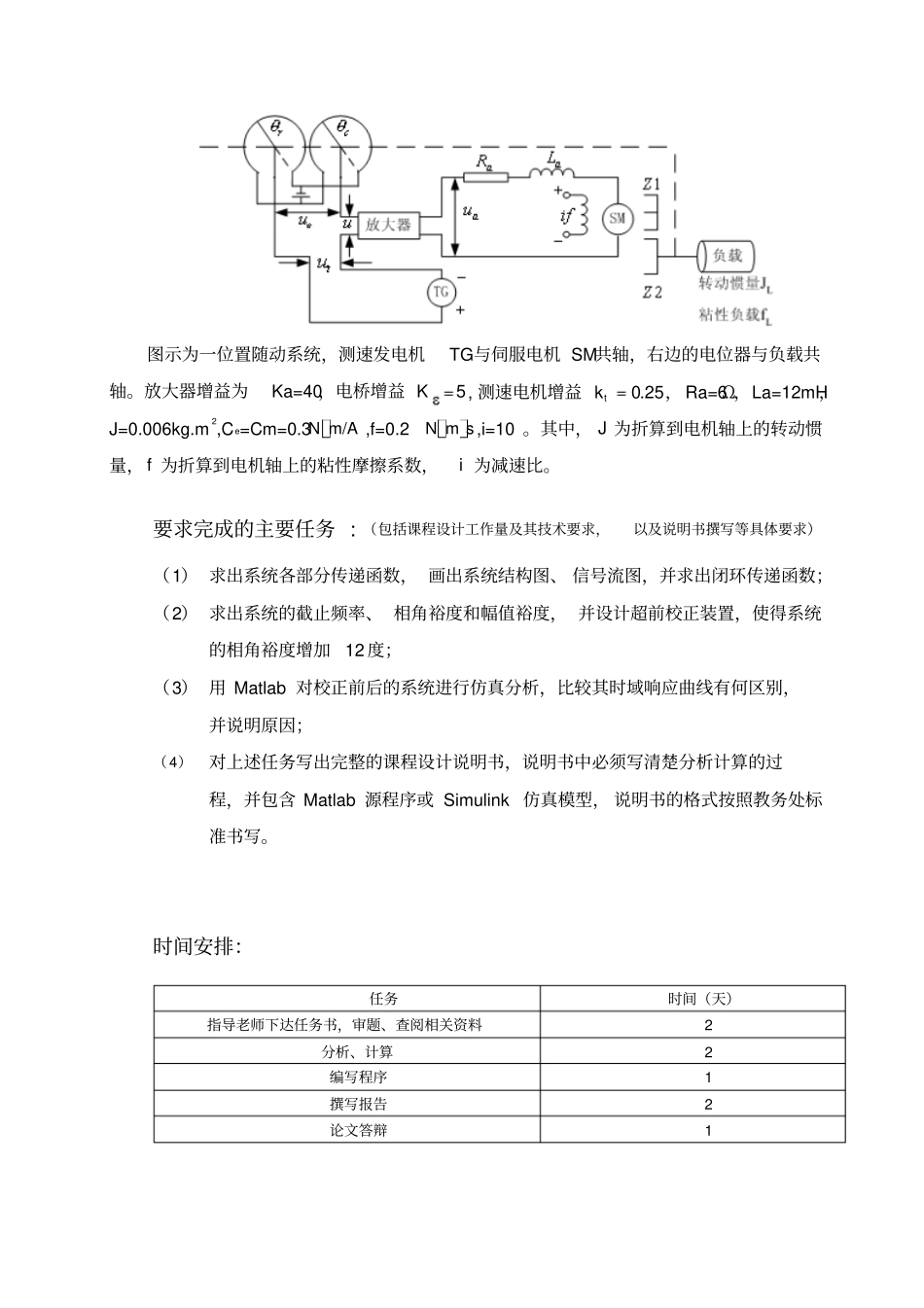
课程设计课程设计任务书题目:位置随动系统的超前校正设计初始条件:图示为一位置随动系统,测速发电机TG与伺服电机SM共轴,右边的电位器与负载共轴
放大器增益为Ka=40,电桥增益5K,测速电机增益25
0tk,Ra=6Ω,La=12mH,J=0
m2,Ce=Cm=0
3Nm/A,f=0
2Nms,i=10
其中,J为折算到电机轴上的转动惯量,f为折算到电机轴上的粘性摩擦系数,i为减速比
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1)求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数;(2)求出系统的截止频率、相角裕度和幅值裕度,并设计超前校正装置,使得系统的相角裕度增加12度;(3)用Matlab对校正前后的系统进行仿真分析,比较其时域响应曲线有何区别,并说明原因;(4)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,并包含Matlab源程序或Simulink仿真模型,说明书的格式按照教务处标准书写
时间安排:任务时间(天)指导老师下达任务书,审题、查阅相关资料2分析、计算2编写程序1撰写报告2论文答辩1指导教师签名:年月日系主任(或责任教师)签名:年月日目录摘要
I1位置随动系统
1位置随动系统原理
2部分元件分析