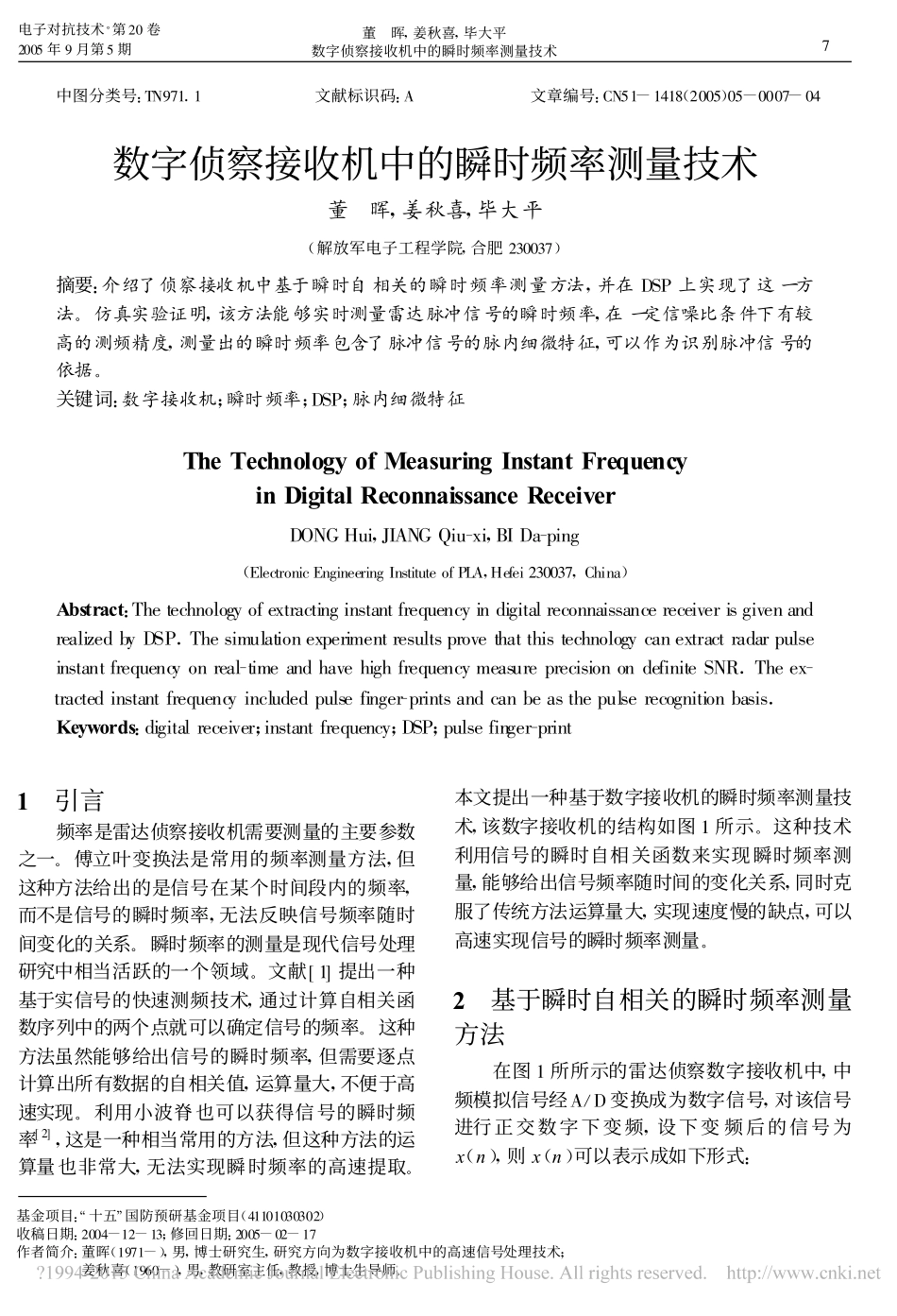
中图分类号:TN971.1文献标识码:A文章编号:CN51-1418(2005)05-0007-04基金项目:“十五”国防预研基金项目(41101030302)收稿日期:2004-12-13;修回日期:2005-02-17作者简介:董晖(1971-),男,博士研究生,研究方向为数字接收机中的高速信号处理技术;姜秋喜(1960-),男,教研室主任,教授,博士生导师。数字侦察接收机中的瞬时频率测量技术董晖,姜秋喜,毕大平(解放军电子工程学院,合肥230037)摘要:介绍了侦察接收机中基于瞬时自相关的瞬时频率测量方法,并在DSP上实现了这一方法。仿真实验证明,该方法能够实时测量雷达脉冲信号的瞬时频率,在一定信噪比条件下有较高的测频精度,测量出的瞬时频率包含了脉冲信号的脉内细微特征,可以作为识别脉冲信号的依据。关键词:数字接收机;瞬时频率;DSP;脉内细微特征TheTechnologyofMeasuringInstantFrequencyinDigitalReconnaissanceReceiverDONGHui,JIANGQiu-xi,BIDa-ping(ElectronicEngineeringInstituteofPLA,Hefei230037,China)Abstract:ThetechnologyofextractinginstantfrequencyindigitalreconnaissancereceiverisgivenandrealizedbyDSP.Thesimulationexperimentresultsprovethatthistechnologycanextractradarpulseinstantfrequencyonreal-timeandhavehighfrequencymeasureprecisionondefiniteSNR.Theex-tractedinstantfrequencyincludedpulsefinger-printsandcanbeasthepulserecognitionbasis.Keywords:digitalreceiver;instantfrequency;DSP;pulsefinger-print1引言频率是雷达侦察接收机需要测量的主要参数之一。傅立叶变换法是常用的频率测量方法,但这种方法给出的是信号在某个时间段内的频率,而不是信号的瞬时频率,无法反映信号频率随时间变化的关系。瞬时频率的测量是现代信号处理研究中相当活跃的一个领域。文献[1]提出一种基于实信号的快速测频技术,通过计算自相关函数序列中的两个点就可以确定信号的频率。这种方法虽然能够给出信号的瞬时频率,但需要逐点计算出所有数据的自相关值,运算量大,不便于高速实现。利用小波脊也可以获得信号的瞬时频率[2],这是一种相当常用的方法,但这种方法的运算量也非常大,无法实现瞬时频率的高速提取。本文提出一种基于数字接收机的瞬时频率测量技术,该数字接收机的结构如图1所示。这种技术利用信号的瞬时自相关函数来实现瞬时频率测量,能够给出信号频率随时间的变化关系,同时克服了传统方法运算量大,实现速度慢的缺点,可以高速实现信号的瞬时频率测量。2基于瞬时自相关的瞬时频率测量方法在图1所所示的雷达侦察数字接收机中,中频模拟信号经A/D变换成为数字信号,对该信号进行正交数字下变频,设下变频后的信号为x(n),则x(n)可以表示成如下形式:7电子对抗技术·第20卷2005年9月第5期董晖,姜秋喜,毕大平数字侦察接收机中的瞬时频率测量技术x(n)=I(n)+jQ(n),0≤n≤N-1(1)图1侦察数字接收机的基本结构其中I(n)是同相分量,Q(n)是正交分量,这两个分量可分别表示为:I(n)=A(n)cos(2πfn/fs+φ0)Q(n)=A(n)sin(2πfn/fs+φ0)(2)其中A(n)为信号的包络,f为信号频率,fs为采样频率,φ0为初始相位。该信号的瞬时自相关函数Rx(n,m)由下式给出:Rx(n,m)=x(n)x*(n+m)(3)其中m为延时间隔。信号瞬时自相关函数与信号自相关的概念不同,通常信号自相关rx(n,m)的定义如下[3]:rx(m)=1N∑N-1n=-(N-1)x(n)x*(n+m)(4)从上式可以看出信号自相关在计算时需要对所有数据求和,而瞬时自相关函数仅对间隔m点的两个数据作乘法运算,无需求和,因此其运算量远远小于自相关运算。为获得信号的瞬时频率,将式(2)代入式(3)得:R(n,m)=A(n)A(n+m)[cos(2πfm/fs)-jsin(2πfm/fs)](5)其相位为:ΧR(n,m)=-arctg(sin(2πfm/fs)/cos(2πfm/fs))(6)显然,当2πfm/fs≤π/2(7)时有:ΧR(n,m)=-2πfm/fs(8)从上式可以看出,瞬时自相关的相位和时延及输入信号的频率有关,和初始相位无关。因此,只要满足条件式(7)的条件,利用式(8)就可以获得信号的无模糊瞬时频率。通常m>0,则从式(7)中可以得到以下关系:m≤fs/4f≤fs/2B(9)也就是当采样频率大于2m倍的信号带宽时,就可以获得信号的无模糊瞬时频率。上述条件是在没有噪声的情况下得到的,在噪声的影响下为避免相位模糊,通常m...