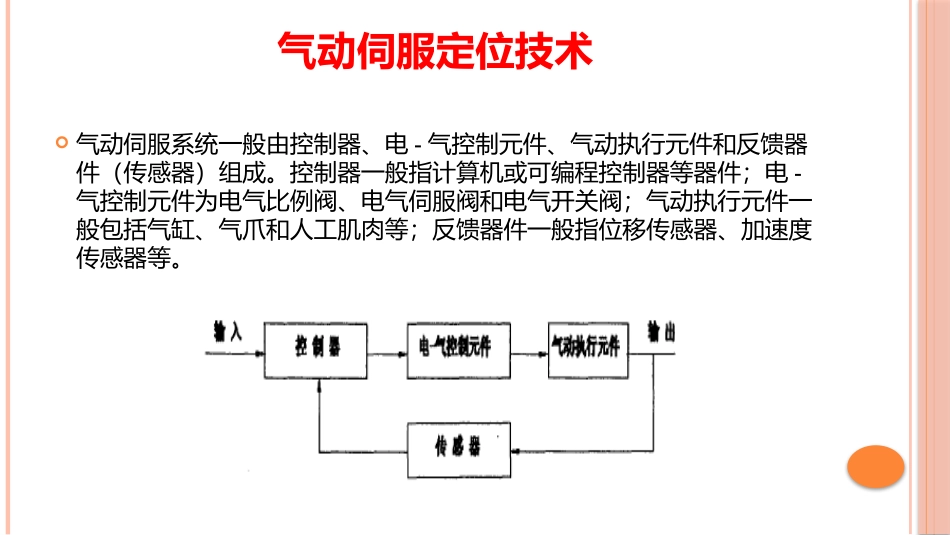
气动伺服定位技术刘雷515101001453气动伺服定位技术起源发展现状气动伺服定位技术气动伺服系统一般由控制器、电-气控制元件、气动执行元件和反馈器件(传感器)组成
控制器一般指计算机或可编程控制器等器件;电-气控制元件为电气比例阀、电气伺服阀和电气开关阀;气动执行元件一般包括气缸、气爪和人工肌肉等;反馈器件一般指位移传感器、加速度传感器等
气动伺服定位技术---起源早期的气动伺服技术是在二十世纪五十年代后期由Shearer等人在美国麻省理工学院开始研究的,并将其应用于航天飞行器的姿态控制和飞行稳定性控制中,这为后来的研究与开发奠定了基础
但当时的气动伺服系统大都采用机械控制方式,将最终输出量转化为机械弹簧位移或气压信号,然后反馈至调节气阀,实现对输出量的连续控制
这些系统的最大缺点是结构复杂,控制精度低,在高频响应的闭环系统中,执行器位置的稳定性很难控制
而且受当时的技术水平等条件所限,气动伺服系统只能应用于工作介质为高温高压的条件下
一旦以工业应用中的低压气源(低于10bar)为工作介质,气动伺服系统就暴露出阻尼小、固有频率低、刚度差和严重非线性等弱点
利用传统的控制方法和理论很难达到理想的控制效果
因此,在六、七十年代,液压伺服技术得到蓬勃发展的时候,气压伺服技术却滞止不前,进展缓慢
后来,现代控制理论的发展,为气动伺服技术的研究奠定了崭新的理论基础
1979年,西德Aachen
W工业大学成功研制出世界上第一台气动伺服阀,使气动伺服控制技术进入了一个全新的发展阶段[4]
气动伺服定位技术---发展八十年代以后,由于微电子技术和现代控制理论的迅速发展,电子技术已渗透到工业的各个领域,各种性能优良的电气控制元件不断出现,为气动技术的进一步发展创造了良好的条件
国外著名的气动元件公司,如德国的Festo、Bosch和日本的SMC等公司先后研制出电气比例阀、电气伺服