目录一、限位定位器技术原理
2二、整体吊弦
4三、关节式自动过分相装置
6四、高可靠、少维修涉及的几个重要技术标准概念
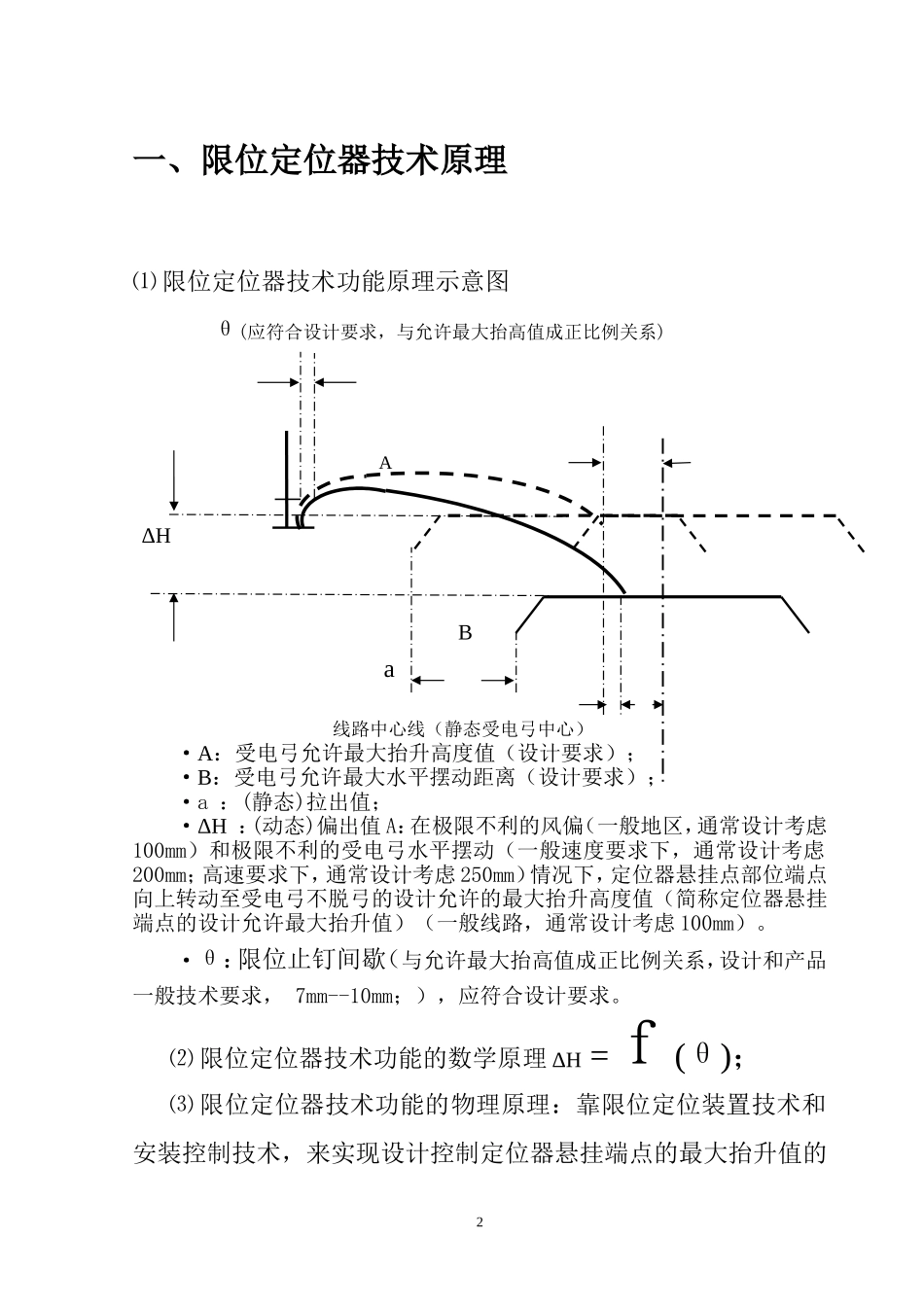
81一、限位定位器技术原理⑴限位定位器技术功能原理示意图θ(应符合设计要求,与允许最大抬高值成正比例关系)AΔHBa线路中心线(静态受电弓中心)·A:受电弓允许最大抬升高度值(设计要求);·B:受电弓允许最大水平摆动距离(设计要求);·a:(静态)拉出值;·ΔH:(动态)偏出值A:在极限不利的风偏(一般地区,通常设计考虑100mm)和极限不利的受电弓水平摆动(一般速度要求下,通常设计考虑200mm;高速要求下,通常设计考虑250mm)情况下,定位器悬挂点部位端点向上转动至受电弓不脱弓的设计允许的最大抬升高度值(简称定位器悬挂端点的设计允许最大抬升值)(一般线路,通常设计考虑100mm)
·θ:限位止钉间歇(与允许最大抬高值成正比例关系,设计和产品一般技术要求,7mm--10mm;),应符合设计要求
⑵限位定位器技术功能的数学原理ΔH=f(θ);⑶限位定位器技术功能的物理原理:靠限位定位装置技术和安装控制技术,来实现设计控制定位器悬挂端点的最大抬升值的2意图,确保不出现翻弓事故现象