第一章:1、传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制
2、智能控制的研究对象具备以下的一些特点:不确定性的模型、高度的非线性、复杂的任务要求
3、IC(智能控制)=AC(自动控制)GAI(人工智能)GOR(运筹学)4、AC:描述系统的动力学特征,是一种动态反馈
AI:是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能
OR:是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等
5、智能控制:即设计一个控制器,使之具有学习、抽象、推理、决策等功能,并能根据环境信息的变化作出适应性,从而实现由人来完成的任务
6、智能控制的几个重要分支为模糊控制、神经网络控制和遗传算法
7、智能控制的特点:1,学习功能2,适应功能3,自组织功能4,优化功能8、智能控制的研究工具:1,符号推理与数值计算的结合2,模糊集理论3,神经网络理论4,遗传算法5,离散事件与连续时间系统的结合
9、智能控制的应用领域,例如智能机器人控制、计算机集成制造系统、工业过程控制、航空航天控制和交通运输系统等
第二章:10、专家系统:是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力
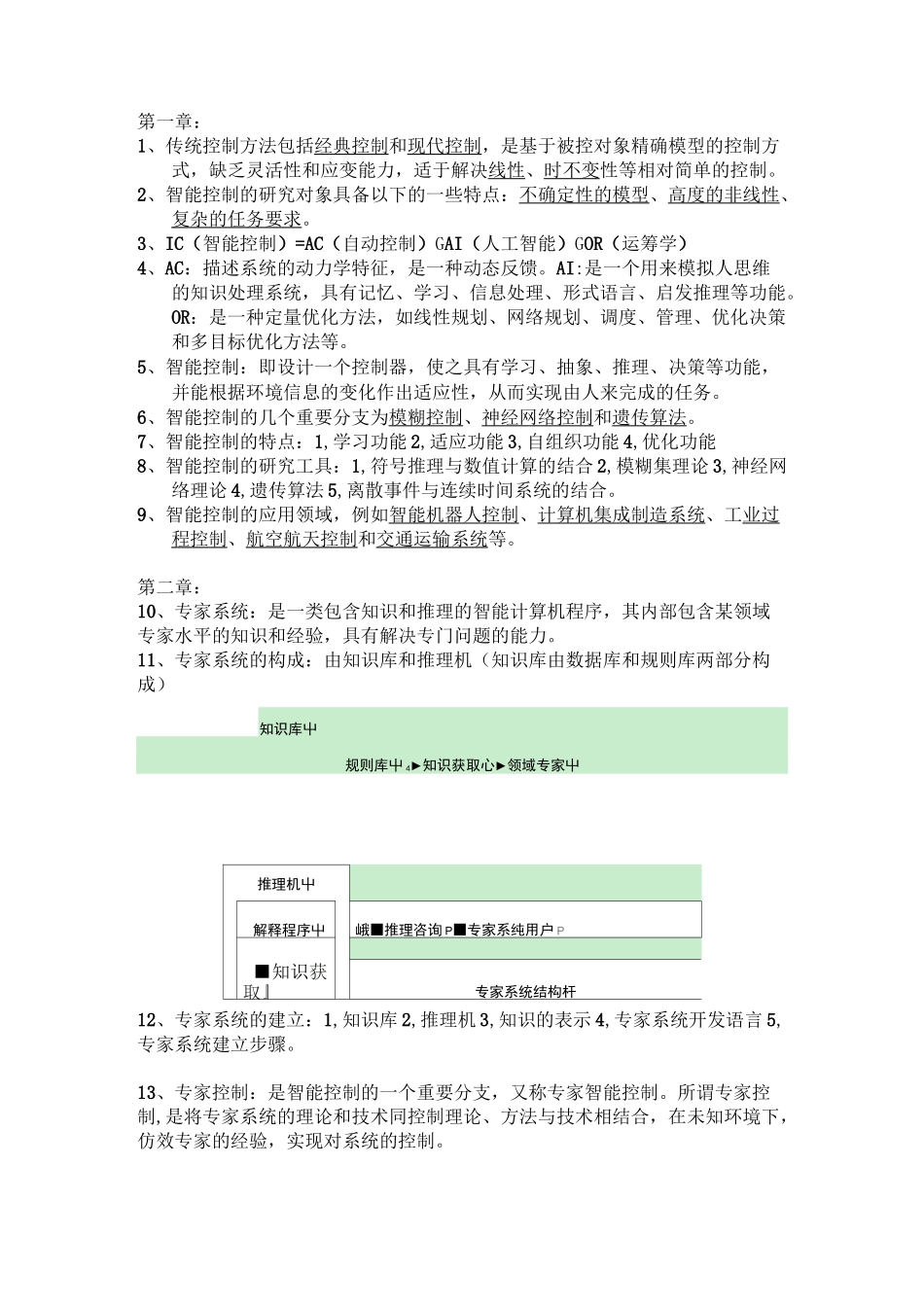
11、专家系统的构成:由知识库和推理机(知识库由数据库和规则库两部分构成)知识库屮规则库屮4►知识获取心►领域专家屮推理机屮解释程序屮峨■推理咨询P■专家系纯用户P■知识获取』专家系统结构杆12、专家系统的建立:1,知识库2,推理机3,知识的表示4,专家系统开发语言5,专家系统建立步骤
13、专家控制:是智能控制的一个重要分支,又称专家智能控制
所谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验