题目:比较分析,找出一种适合乒乓球机器人的末端姿态的欧拉角方法姿态的欧拉角表示任何旋转矩阵都可以通过三个欧拉角进行参数化,一般来说,绕三个坐标轴的顺次旋转可以到达任意的姿态,由于旋转矩阵的乘法是非交换的,因此旋转的次序是很重要的
按照旋转所绕轴的次序的不同,共有12种不同的欧拉角
六种非对称型欧拉角:XYZ,XZY,YXZ,YZX,ZXY和ZYX;六种对称型欧拉角:XYX,XZX,YXY,YZY,ZXZ和ZYZ
记绕三个坐标轴的基本旋转矩阵为:1、非对称型欧拉角表示当三个旋转所绕的坐标轴相互不同时,称为非对称型欧拉角表示
以XYZ欧拉角为例,假定起始时物体坐标系与惯性坐标系重合,首先刚体绕物体坐标系的x-轴旋转α角,接着绕y-轴旋转β角,最后绕z-轴旋转角,则刚体最终的姿态矩阵为:上式给出了XYZ欧拉角参数的正运动学方程,反解该式可求得其逆运动学方程,给定姿态矩阵R=【rij】3×3时,可求得其逆运动学方程为:从上式可以看出,当β=π2时,逆运动学存在奇异
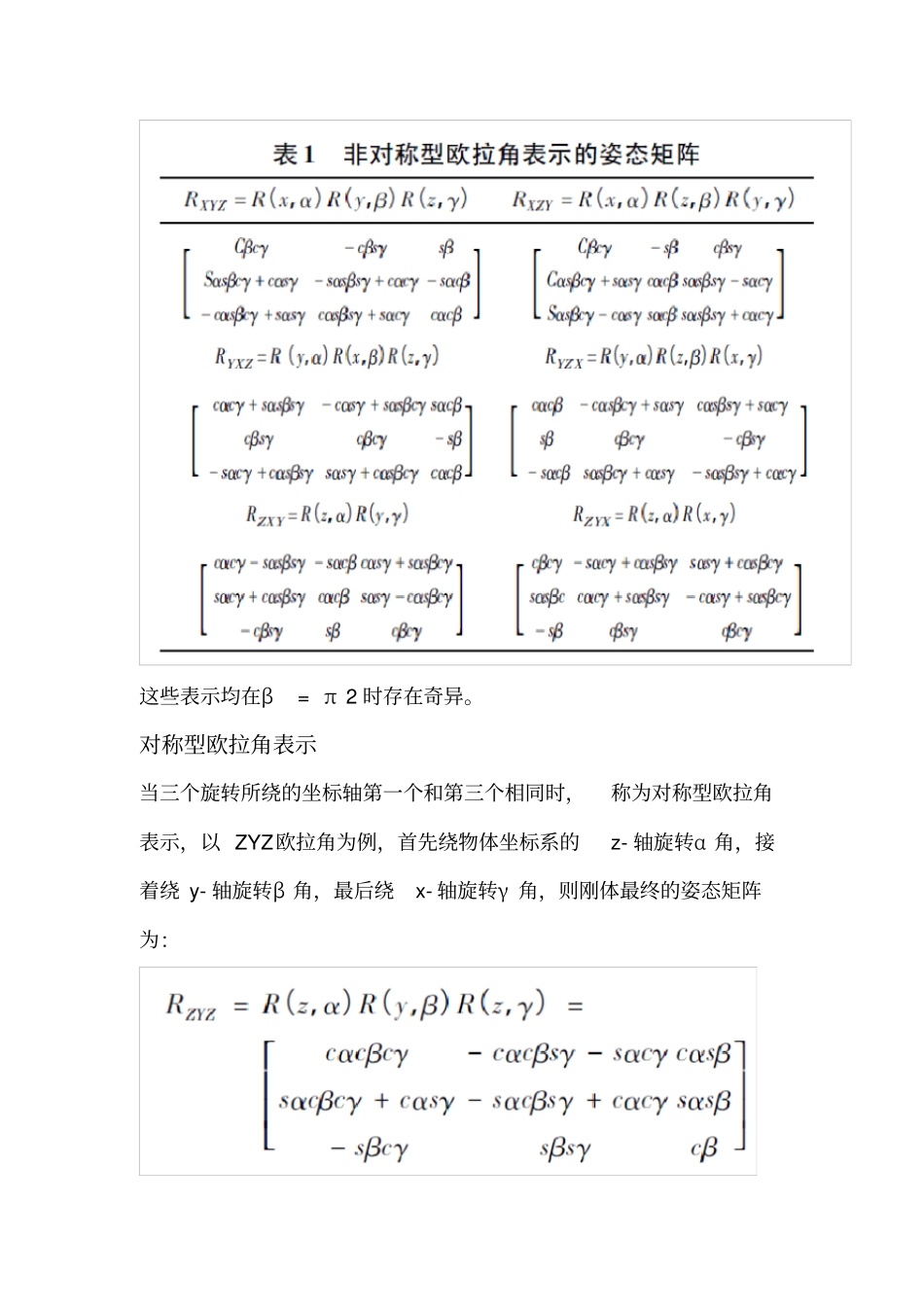
其他五种非对称型欧拉角表示的姿态矩阵计算结果列于表1
这些表示均在β=π2时存在奇异
对称型欧拉角表示当三个旋转所绕的坐标轴第一个和第三个相同时,称为对称型欧拉角表示,以ZYZ欧拉角为例,首先绕物体坐标系的z-轴旋转α角,接着绕y-轴旋转β角,最后绕x-轴旋转γ角,则刚体最终的姿态矩阵为:另外还有五种对称型欧拉角表示的姿态矩阵列于表2
这些表示均在β=0时存在奇异
欧拉角表示与RPY角表示的对偶性姿态的三参数描述还有一种称为RPY角参数的方法
1和2中所描述的欧拉角参数的运动过程都是在物体坐标系中进行的,因此其姿态矩阵是按照矩阵的右乘规则得到的
而RPY角参数的运动过程则是在惯性坐标系中完成的,其姿态矩阵是按照矩阵的左乘规则得到
这样,与12种欧拉角参数相对应的就有12种RPY角参数
以ZYXRPY角参数为例,其运动过程