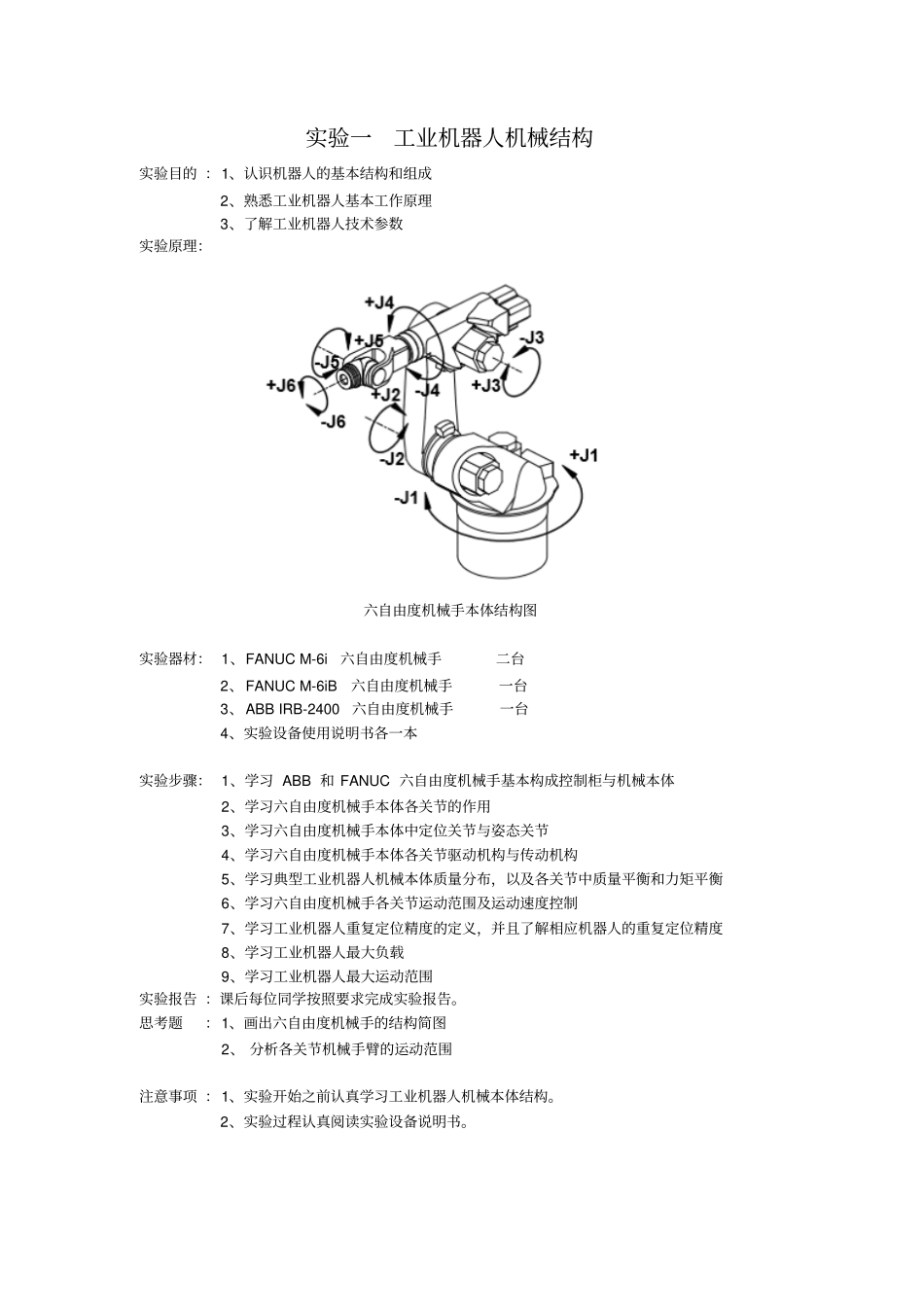
总评成绩:《机器人应用技术》实验报告专业:机电一体化班级:机电141班学号:140212107姓名:刘宗成河南工学院机电工程系实验一工业机器人机械结构实验目的:1、认识机器人的基本结构和组成2、熟悉工业机器人基本工作原理3、了解工业机器人技术参数实验原理:六自由度机械手本体结构图实验器材:1、FANUCM-6i六自由度机械手二台2、FANUCM-6iB六自由度机械手一台3、ABBIRB-2400六自由度机械手一台4、实验设备使用说明书各一本实验步骤:1、学习ABB和FANUC六自由度机械手基本构成控制柜与机械本体2、学习六自由度机械手本体各关节的作用3、学习六自由度机械手本体中定位关节与姿态关节4、学习六自由度机械手本体各关节驱动机构与传动机构5、学习典型工业机器人机械本体质量分布,以及各关节中质量平衡和力矩平衡6、学习六自由度机械手各关节运动范围及运动速度控制7、学习工业机器人重复定位精度的定义,并且了解相应机器人的重复定位精度8、学习工业机器人最大负载9、学习工业机器人最大运动范围实验报告:课后每位同学按照要求完成实验报告
思考题:1、画出六自由度机械手的结构简图2、分析各关节机械手臂的运动范围注意事项:1、实验开始之前认真学习工业机器人机械本体结构
2、实验过程认真阅读实验设备说明书
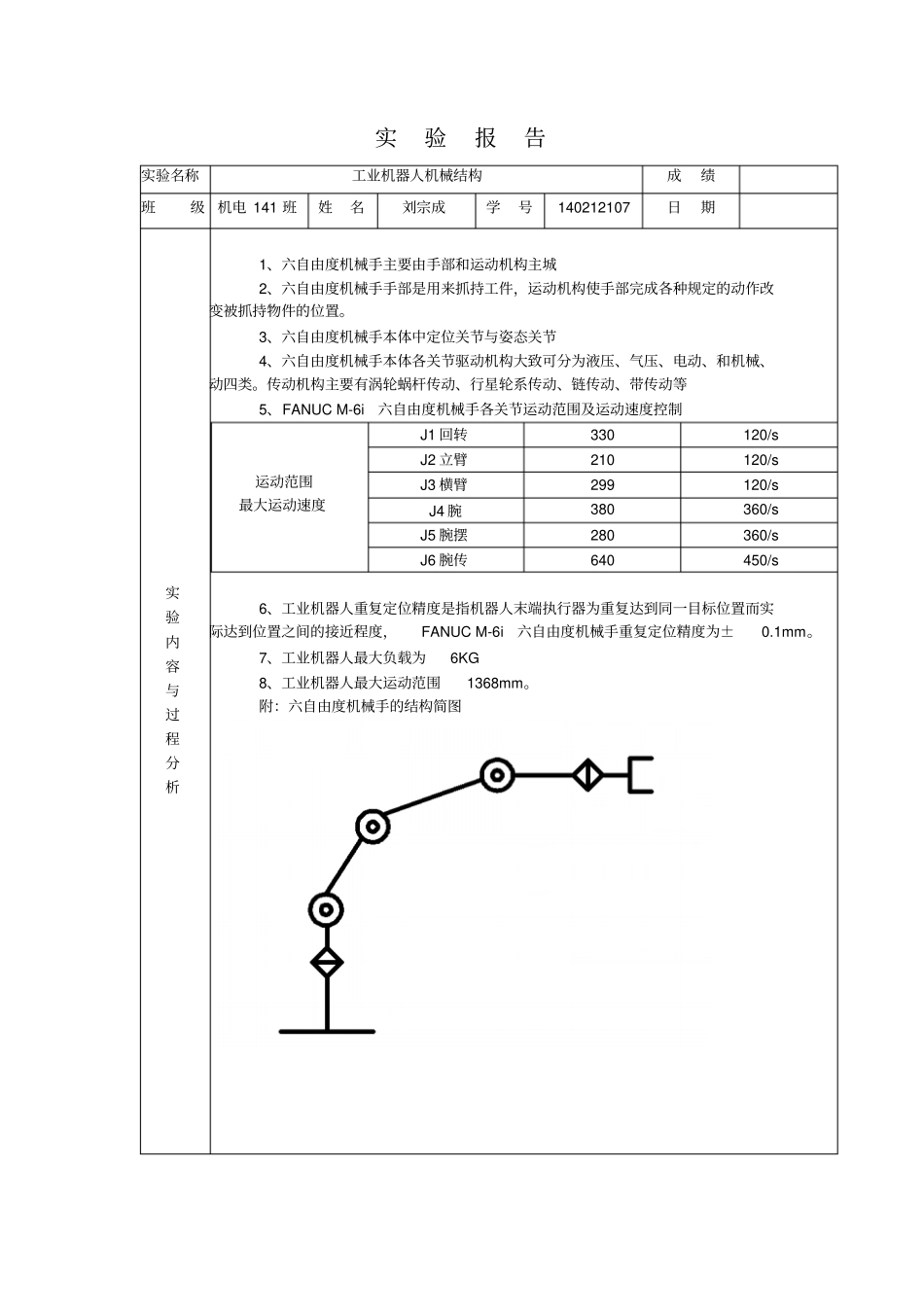
实验报告实验名称工业机器人机械结构成绩班级机电141班姓名刘宗成学号140212107日期实验内容与过程分析1、六自由度机械手主要由手部和运动机构主城2、六自由度机械手手部是用来抓持工件,运动机构使手部完成各种规定的动作改变被抓持物件的位置
3、六自由度机械手本体中定位关节与姿态关节4、六自由度机械手本体各关节驱动机构大致可分为液压、气压、电动、和机械、动四类
传动机构主要有涡轮蜗杆传动、行星轮系传动、链传动、带传动等5、FANUCM-6i六自由度机械手各关节运动范围及运动速度控制运动范