5本章主要内容(1)定义运动副(2)创建运动副(3)添加驱动对运动
定义运动副时,一般都需要选择两个构件,第3章添加约束即使在只选择一个构件的情况下,也需要将另一个构件默认为大地,而且是第一个构件相对于第二个构件运动
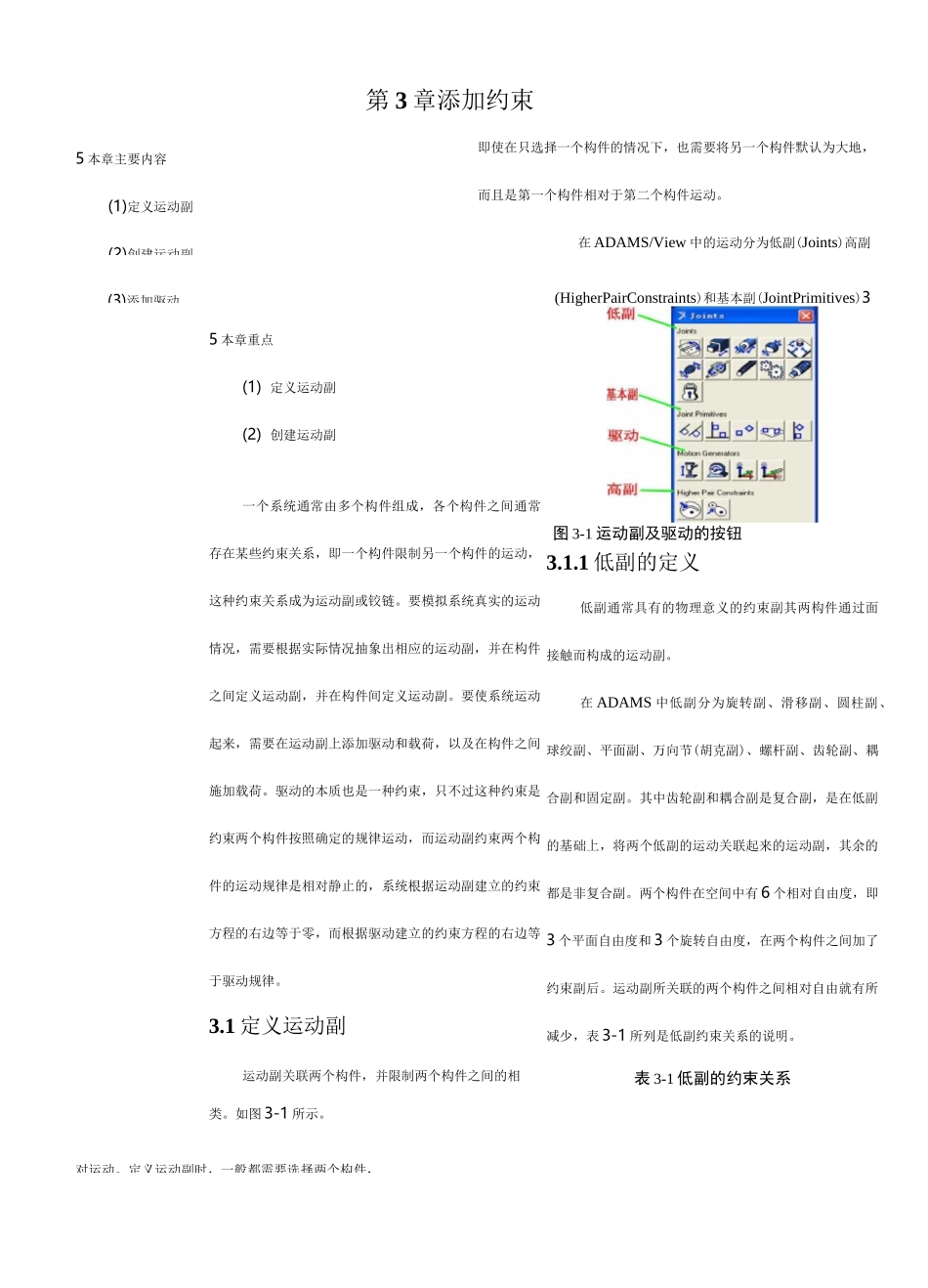
在ADAMS/View中的运动分为低副(Joints)高副(HigherPairConstraints)和基本副(JointPrimitives)35本章重点(1)定义运动副(2)创建运动副一个系统通常由多个构件组成,各个构件之间通常存在某些约束关系,即一个构件限制另一个构件的运动,这种约束关系成为运动副或铰链
要模拟系统真实的运动情况,需要根据实际情况抽象出相应的运动副,并在构件之间定义运动副,并在构件间定义运动副
要使系统运动起来,需要在运动副上添加驱动和载荷,以及在构件之间施加载荷
驱动的本质也是一种约束,只不过这种约束是约束两个构件按照确定的规律运动,而运动副约束两个构件的运动规律是相对静止的,系统根据运动副建立的约束方程的右边等于零,而根据驱动建立的约束方程的右边等于驱动规律
1定义运动副运动副关联两个构件,并限制两个构件之间的相类
如图3-1所示
图3-1运动副及驱动的按钮3
1低副的定义低副通常具有的物理意义的约束副其两构件通过面接触而构成的运动副
在ADAMS中低副分为旋转副、滑移副、圆柱副、球绞副、平面副、万向节(胡克副)、螺杆副、齿轮副、耦合副和固定副
其中齿轮副和耦合副是复合副,是在低副的基础上,将两个低副的运动关联起来的运动副,其余的都是非复合副
两个构件在空间中有6个相对自由度,即3个平面自由度和3个旋转自由度,在两个构件之间加了约束副后
运动副所关联的两个构件之间相对自由就有所减少,表3-1所列是低副约束关系的说明
表3-1低副的约束关系r»idL越eK
朋-bUiCJuU
銅野口曲十吟外A比石置七艺
M*口嬉<T1机IEE