word格式,,专业
实验1机器人机械系统一、实验目的1、了解机器人机械系统的组成;2、了解机器人机械系统各部分的原理和作用;3、掌握机器人单轴运动的方法;二、实验设备1、RBT-5T/S02S教学机器人一台2、RBT-5T/S02S教学机器人控制系统软件一套3、装有运动控制卡的计算机一台三、实验原理RBT-5T/S02S五自由度教学机器人机械系统主要由以下几大部分组成:原动部件、传动部件、执行部件
基本机械结构连接方式为原动部件——传动部件——执行部件
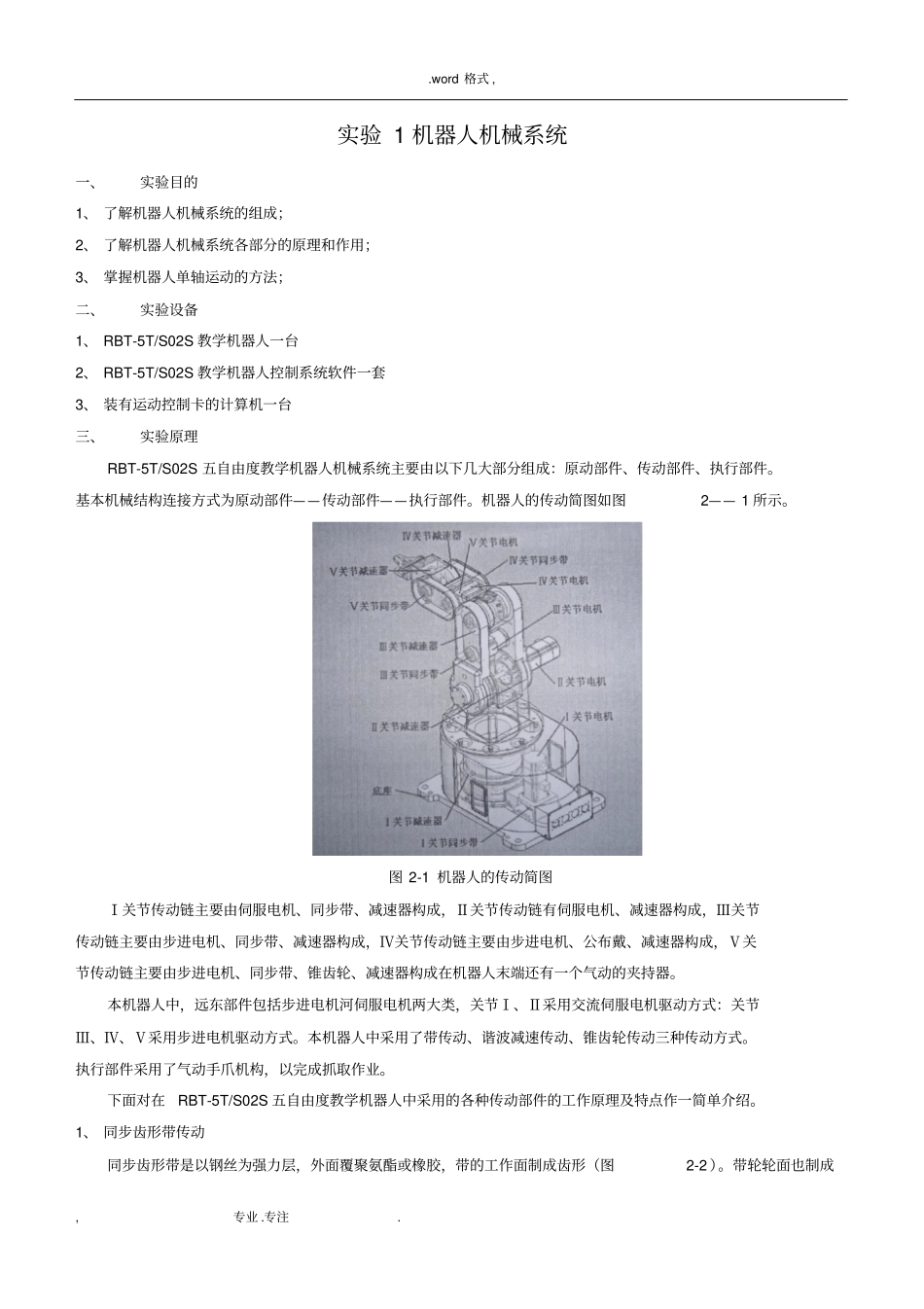
机器人的传动简图如图2——1所示
图2-1机器人的传动简图Ⅰ关节传动链主要由伺服电机、同步带、减速器构成,Ⅱ关节传动链有伺服电机、减速器构成,Ⅲ关节传动链主要由步进电机、同步带、减速器构成,Ⅳ关节传动链主要由步进电机、公布戴、减速器构成,Ⅴ关节传动链主要由步进电机、同步带、锥齿轮、减速器构成在机器人末端还有一个气动的夹持器
本机器人中,远东部件包括步进电机河伺服电机两大类,关节Ⅰ、Ⅱ采用交流伺服电机驱动方式:关节Ⅲ、Ⅳ、Ⅴ采用步进电机驱动方式
本机器人中采用了带传动、谐波减速传动、锥齿轮传动三种传动方式
执行部件采用了气动手爪机构,以完成抓取作业
下面对在RBT-5T/S02S五自由度教学机器人中采用的各种传动部件的工作原理及特点作一简单介绍
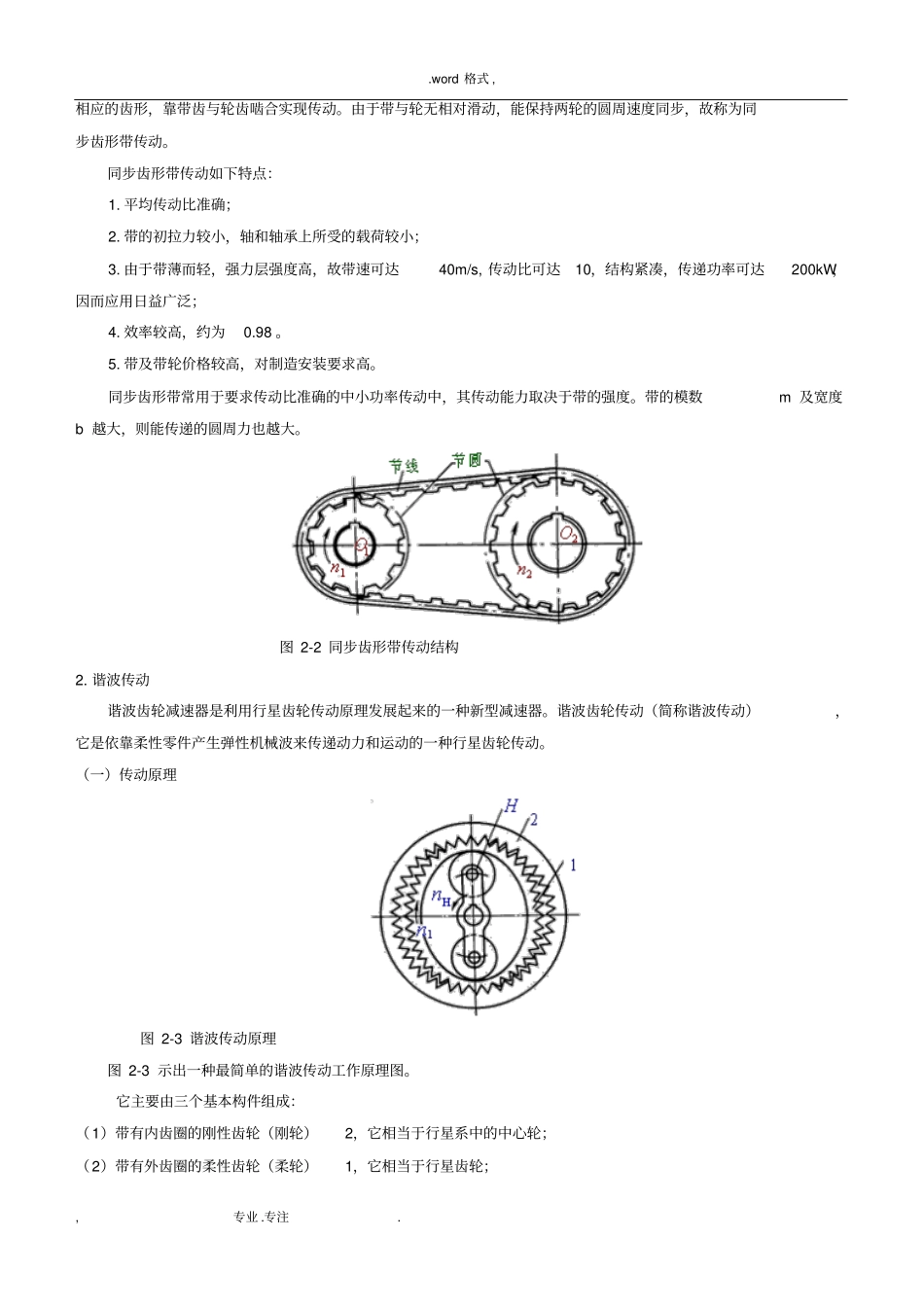
1、同步齿形带传动同步齿形带是以钢丝为强力层,外面覆聚氨酯或橡胶,带的工作面制成齿形(图2-2)
带轮轮面也制成
word格式,,专业
相应的齿形,靠带齿与轮齿啮合实现传动
由于带与轮无相对滑动,能保持两轮的圆周速度同步,故称为同步齿形带传动
同步齿形带传动如下特点:1
平均传动比准确;2
带的初拉力较小,轴和轴承上所受的载荷较小;3
由于带薄而轻,强力层强度高,故带速可达40m/s,传动比可达10,结构紧凑,传递功率可达200kW,因而应用日益广泛;4
效率较高,约为