《机械制造装备设计》试卷(闭卷)(试卷编号:09)(考试时间:120分钟适用机制专业)1题号一二三四五六七总分复核人分值1040301010100得分一、概念题(每题2分,共10分)1、工业机器人位姿2、定位误差3.立体仓库4、生产线节拍5、机器人自由度二、简述题(每题10分,共40分)1、工业机器人的驱动方式有那些
如何选用驱动方式
2、柔性制造系统的组成和规划内容是什么
得分批阅人得分批阅人3
试述根据什么原则,选择支承件的截面形状,摇臂钻床摇臂的截面为何种形状
为什么为该形状
4、六点定位原理是什么
平面定位时其定位元件如何选择
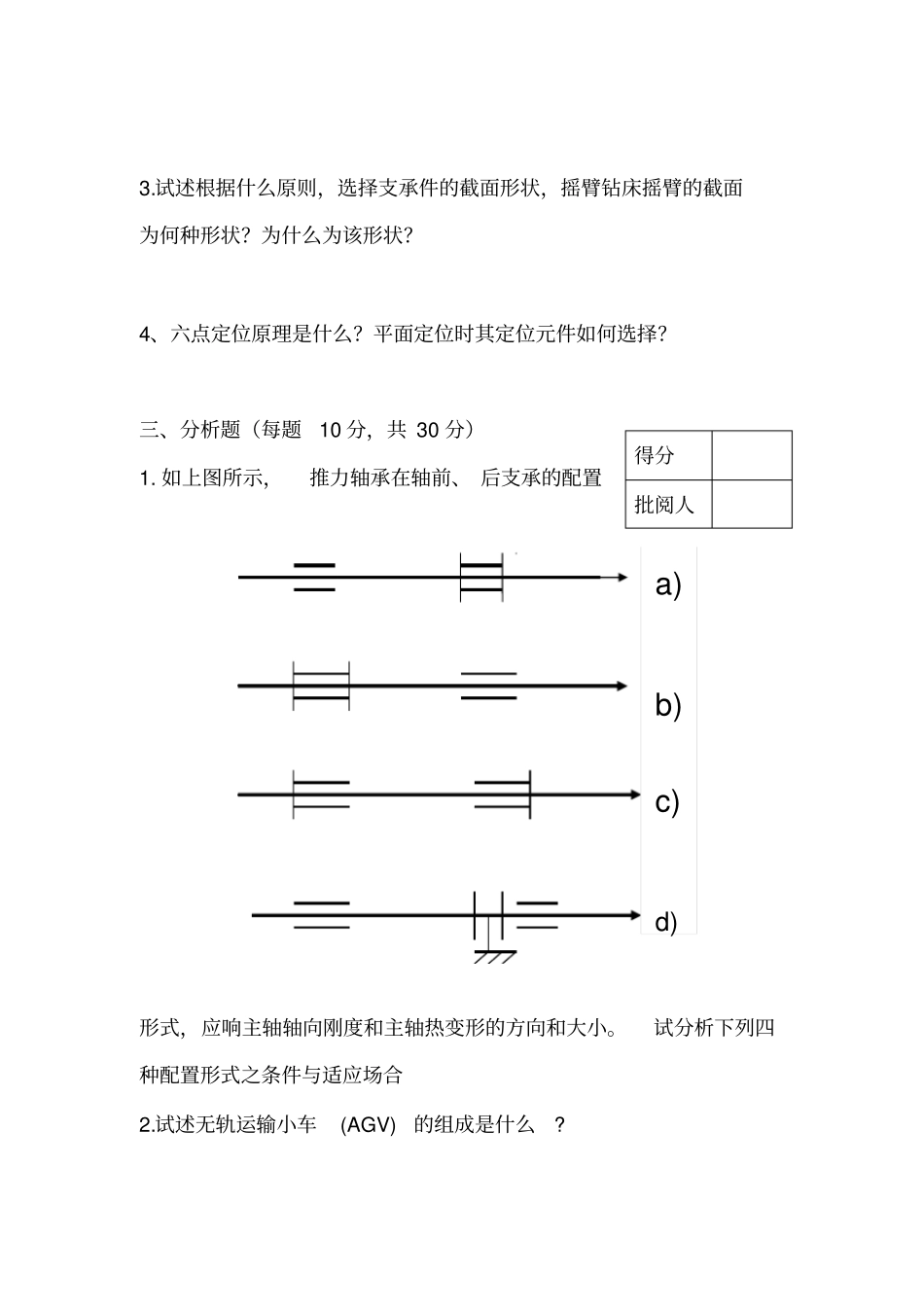
三、分析题(每题10分,共30分)1
如上图所示,推力轴承在轴前、后支承的配置形式,应响主轴轴向刚度和主轴热变形的方向和大小
试分析下列四种配置形式之条件与适应场合2
试述无轨运输小车(AGV)的组成是什么
得分批阅人a)b)c)d)3.试述机床的基本参数包括那些内容
四、计算题(共10分)加工某一工件采用一面两孔定位,大孔采用一个圆柱销定位,小孔采用一个菱形销
已知大孔直径013
00125Dmm,圆柱销直径0009
0125dmm,小孔直径009
00210Dmm,菱形销直径013
0210dmm,两孔中心距05
040Lmm,试计算转角误差
分析各定位元件所限制的自由度
转速图设计:根据下图所示Z3040摇臂钻床主传动系统转速图,回答下列问题
(10分)1)写出其结构式2)写出Ⅴ---Ⅵ轴间变速组的变速范围公式及其大小
ⅠⅠ3)写出Ⅵ轴变速范围公式及其大小
4)找出轴Ⅲ--Ⅵ轴的计算转速
得分批阅人得分批阅人《机械制造装备设计》答案(9)一.概念题(10分每小题2分)1.工业机器人的位置与姿态,是指机器人末端执行器的位置坐标
其姿态是指末端执行器的三个转动角度
(2分)2.定位误差:加工工序基准,在加工方向上的,最大位置变