自动控制清洗系统前言1毕业课题任务描述初始状态,升降气缸伸出,停留在位置2(空位)
搬运爪通过电机控制的丝杠系统移动,完成取货和放货动作
按下启动按钮,丝杠系统带动气缸爪移动到1位置气缸缩回取货,搬运货物到3位,气缸伸出放下货物,延时5秒气缸缩回取出货物,移动到4位气缸伸出放下货物再延时5秒气缸缩回取出货物移动到5位气缸伸出放下货物,然后移动到2位(初始位置)等待下一次运行搬运
2毕业课题的组成自动控制清洗系统分为两个不同的控制过程:①自动控制过程和②手动控制过程
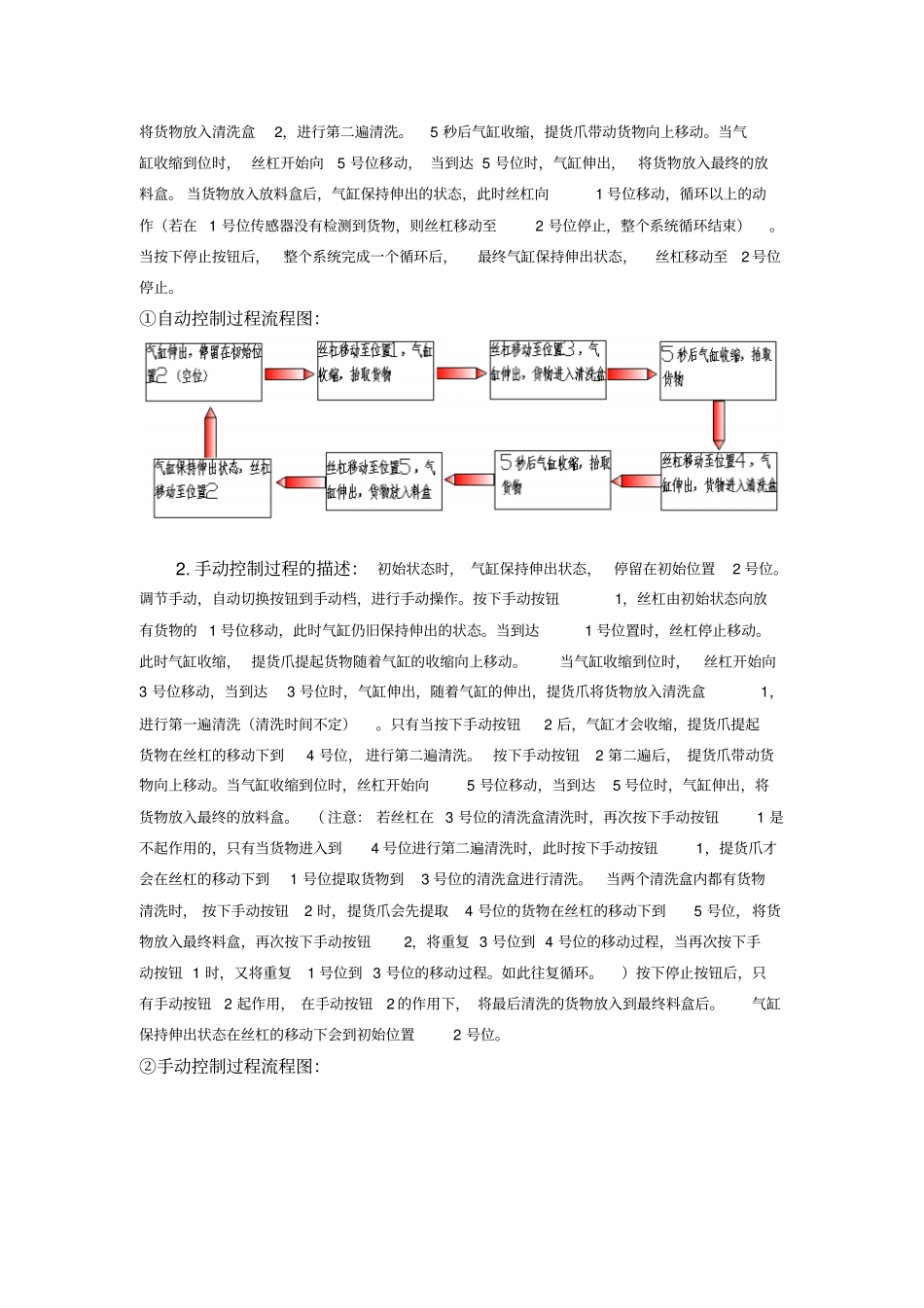
自动控制过程的描述:初始状态时,气缸保持伸出状态,停留在初始位置2号位
调节手动,自动切换按钮到自动档,进行自动操作
当按下启动按钮时,丝杠开始向放有货物的1号位移动,此时气缸仍旧保持伸出的状态
当到达1号位置时,丝杠停止移动
此时气缸收缩,提货爪提起货物随着气缸的收缩向上移动
当气缸收缩到位时,丝杠开始向3号位移动,当到达3号位时,气缸伸出,随着气缸的伸出,提货爪将货物放入清洗盒1,进行第一遍清洗(一次清洗5秒钟)
5秒后气缸收缩,提货爪带动货物向上移动
当气缸收缩到位时,丝杠开始向4号位移动,当到达4号位时,气缸伸出,随着气缸的伸出,提货爪将货物放入清洗盒2,进行第二遍清洗
5秒后气缸收缩,提货爪带动货物向上移动
当气缸收缩到位时,丝杠开始向5号位移动,当到达5号位时,气缸伸出,将货物放入最终的放料盒
当货物放入放料盒后,气缸保持伸出的状态,此时丝杠向1号位移动,循环以上的动作(若在1号位传感器没有检测到货物,则丝杠移动至2号位停止,整个系统循环结束)
当按下停止按钮后,整个系统完成一个循环后,最终气缸保持伸出状态,丝杠移动至2号位停止
①自动控制过程流程图:2
手动控制过程的描述:初始状态时,气缸保持伸出状态,停留在初始位置2号位
调节手动,自动切换按钮到手动档,进行手动操作
按下手动按钮1,丝杠由初始