《机电传动控制》复习题1
机电传动控制的目的是:把电能转变为机械能、实现生产机械的启动、停止与调速、满足生产工艺的要求、保证生产过程的正常进行
机电传动控制系统的四个发展阶段是:接触器-继电器控制、具有反馈环节的控制、大功率可控电力半导体器件控制、工业机器人控制
写出直流电动机的5个主要组成部分:换向器,电刷装置、机座,主磁极,换向极,端盖
写出交流电动机的5个主要组成部分:弹簧片,轴承,定子绕组,机座,转子铁芯,端盖
开环控制是指输出端与输入端没有任何电路联系、输出端无信号反馈回输入端的控制
闭环控制是指输出端与输入端具有电路联系、输出端有信号反馈回输入端的控制
机电传动系统运动方程式中的概念:A
拖动转矩:是由电动机产生用来克服负载转矩,以带动生产机械运动的Tm、静态转矩:是由生产机械产生的负载转矩TL、动态转矩:动态转矩是拖动转矩减去静态转矩Tm-TL
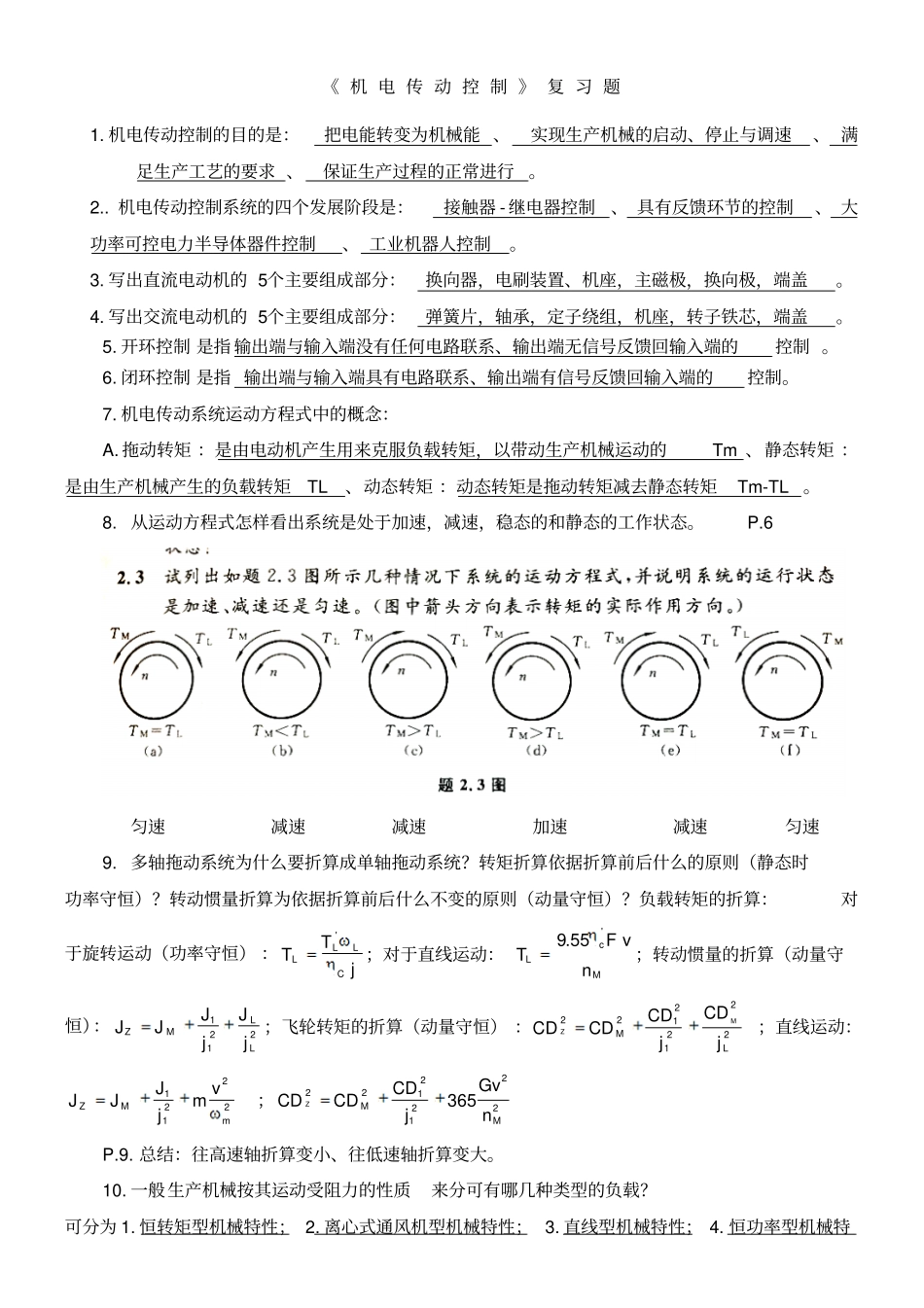
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态
6匀速减速减速加速减速匀速9
多轴拖动系统为什么要折算成单轴拖动系统
转矩折算依据折算前后什么的原则(静态时功率守恒)
转动惯量折算为依据折算前后什么不变的原则(动量守恒)
负载转矩的折算:对于旋转运动(功率守恒):jTTCLLL';对于直线运动:McLnvFT'55
9;转动惯量的折算(动量守恒):2211LLMZjJjJJJ;飞轮转矩的折算(动量守恒):22212122LMjCDjCDCDCDMZ;直线运动:22211mMZvmjJJJ;22212122365MMnGvjCDCDCDZP
总结:往高速轴折算变小、往低速轴折算变大
一般生产机械按其运动受阻力的性质来分可有哪几种类型的负载
恒转矩型机械特性;2
离心式通风机型机械特性;3
直线型机械特性;4
恒功率型机械特性