控制系统的校正及综合1控制系统校正的一般概念1
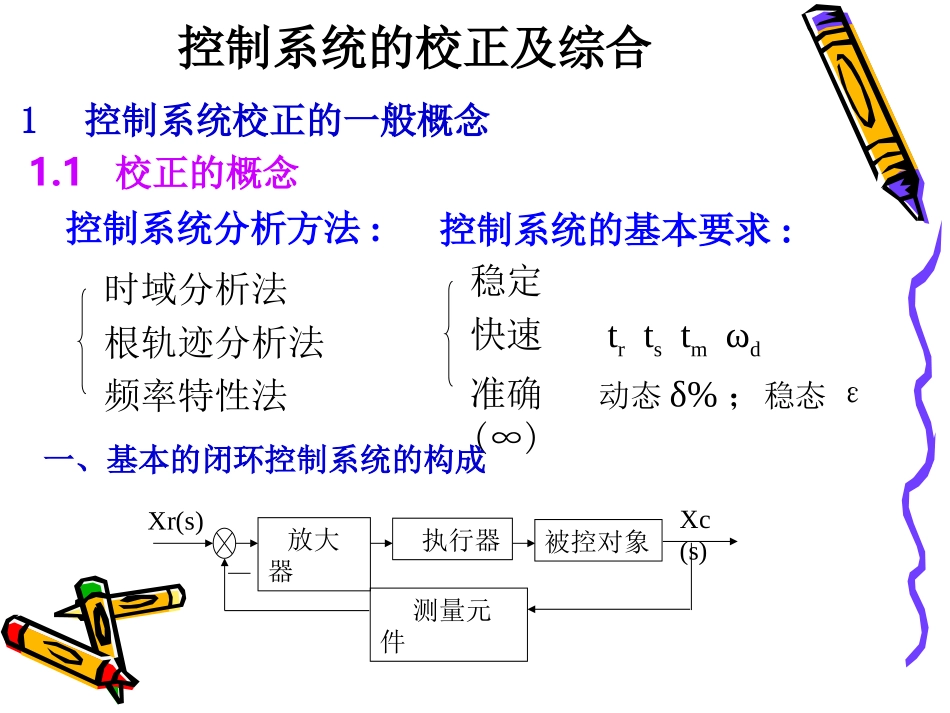
1校正的概念时域分析法根轨迹分析法频率特性法控制系统的基本要求:控制系统分析方法:稳定快速trtstmωd准确动态δ%;稳态ε(∞)一、基本的闭环控制系统的构成放大器执行器测量元件Xr(s)Xc(s)被控对象一般除放大器的增益可调外,其余部分是固定不变的(称为系统的不可变部分)
通常仅靠改变放大器的增益是不可能同时满足对系统提出的各项性能指标要求的,这就需要在系统中引进一些附加装置来改变整个系统的特性以满足对性能指标的要求
二、控制系统的校正把为改善系统静动态性能而引入的装置称为校正装置,即控制器
校正装置的结构形式的确定和参数整定的过程称为控制系统的校正,也就是通常所说的控制系统的综合问题
校正系统的任务就是确定满足性能指标要求的校正装置的结构形式及参数
校正系统的方法有时域法、根轨迹法和频率法三、校正的方法时域法::通过改变校正装置,计算时域指标,直到指标满足要求为止
根轨迹法:就是通过引入校正装置改变系统的开环零极点的分布,进而改变系统的闭环根轨迹,即闭环特征根的位置,实现闭环极点的按期望位置的配置
频率特性法:就是通过校正装置来改变系统开环频率特性的形状,进而达到改善系统的动静态品质的目的
本章主要讨论频率法对线性定常单输入/单输出系统校正的基本步骤和方法
2校正的基本方式1.串联校正校正装置放在前向通道的前端,与系统的不可变部分直接串联连接,如图
XC(s)Xr(s)串联校正)(sWc)(sWo)(sH)(sHc为反馈校正装置的传递函数
)(sWc)(sH)(sWo图中,为系统不可变部为校正装置的传递函数;为反馈通道的传递函数
分的传递函数;串联校正串联超前校正串联迟后校正串联迟后—超前校正2.反馈校正校正装置放在反馈通道里,它包围系统不可变部分的全部或其中一部分,如图
反馈校正XC(s)Xr(s))(1sW