原稿题目:原稿出处:毕业设计(论文)译文及原稿DesignandSimulationBasedonPro/EforaHydraulicLiftPlatforminScissorsTypeBeijingUnionUniversity,BeijingChaowaibaijiazhuang,Beijing100020,China译文题目:剪刀式液压升降平台的设计与仿真浙江工业大学之江学院毕业设计(论文)外文翻译3浙江工业大学之江学院毕业设计(论文)外文翻译2表1平台速度比较角度20°30°40°50°60°气缸速度:1米/分钟0
51米/分钟0
75米/分钟0
96米/分钟1
15米/分钟1
30米/分钟气缸速度:5米/分钟9
6米/分钟6
6米/分钟5
13米/分钟4
31米/分钟3
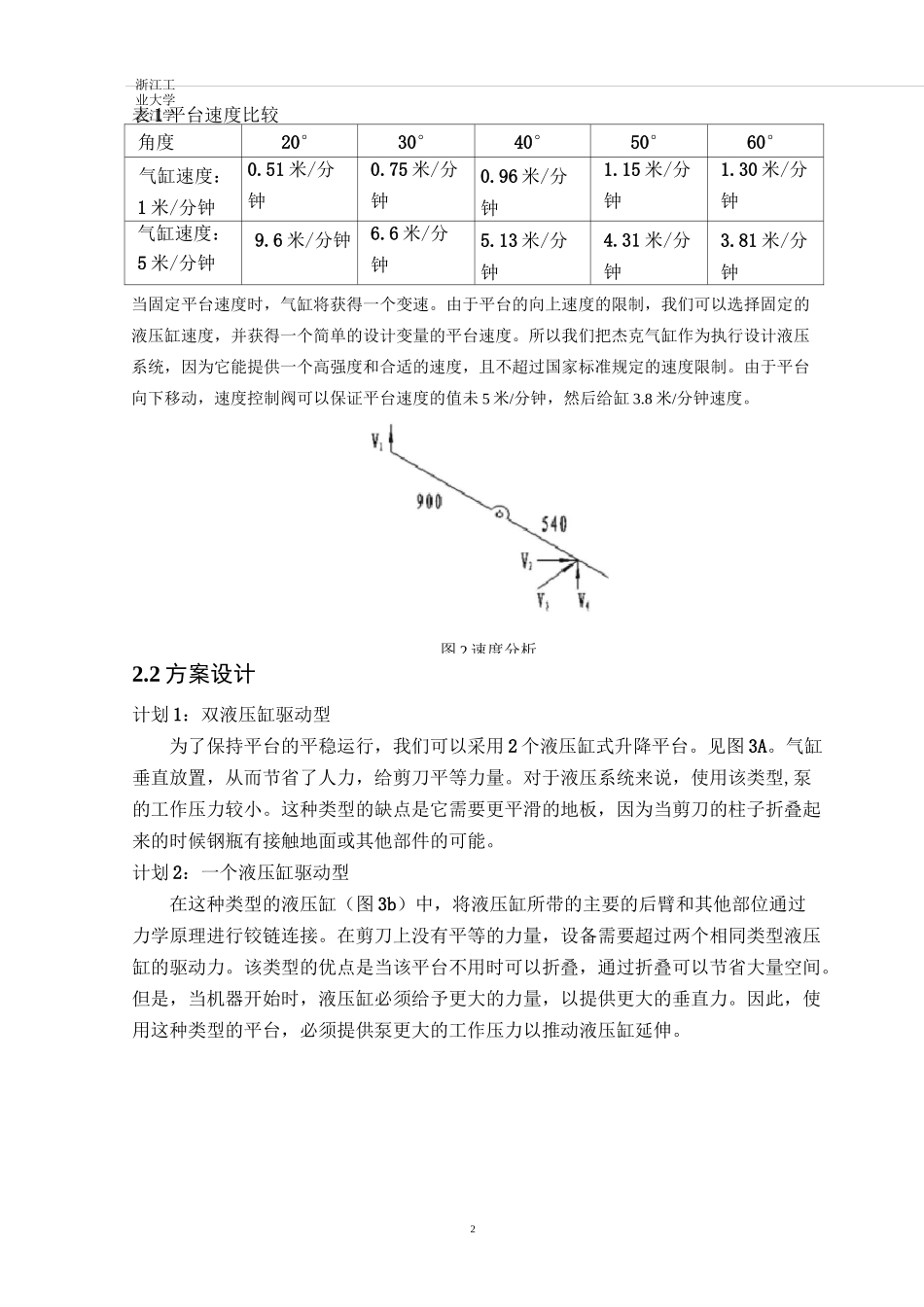
81米/分钟当固定平台速度时,气缸将获得一个变速
由于平台的向上速度的限制,我们可以选择固定的液压缸速度,并获得一个简单的设计变量的平台速度
所以我们把杰克气缸作为执行设计液压系统,因为它能提供一个高强度和合适的速度,且不超过国家标准规定的速度限制
由于平台向下移动,速度控制阀可以保证平台速度的值未5米/分钟,然后给缸3
8米/分钟速度
2方案设计计划1:双液压缸驱动型为了保持平台的平稳运行,我们可以采用2个液压缸式升降平台
气缸垂直放置,从而节省了人力,给剪刀平等力量
对于液压系统来说,使用该类型,泵的工作压力较小
这种类型的缺点是它需要更平滑的地板,因为当剪刀的柱子折叠起来的时候钢瓶有接触地面或其他部件的可能
计划2:一个液压缸驱动型在这种类型的液压缸(图3b)中,将液压缸所带的主要的后臂和其他部位通过力学原理进行铰链连接
在剪刀上没有平等的力量,设备需要超过两个相同类型液压缸的驱动力
该类型的优点是当该平台不用时可以折叠,通过折叠可以节省大量空间
但是,当机器开始时,液压缸必须