设计内容主要结论1第一章概述1
1机器人概述机器人----这一词最早使用始于1920年至1930年期间在捷克作家凯勒尔*凯佩克(Karelcapek)的名为"罗莎姆的万能机器人"的幻想剧中,一些小的人造的和拟人的傀儡绝对地服从其主人的命令
这些傀儡被称为“机器人”
该单词起源于捷克语“robota”
意思是“强制的劳动”
机器人的组成与人类相似
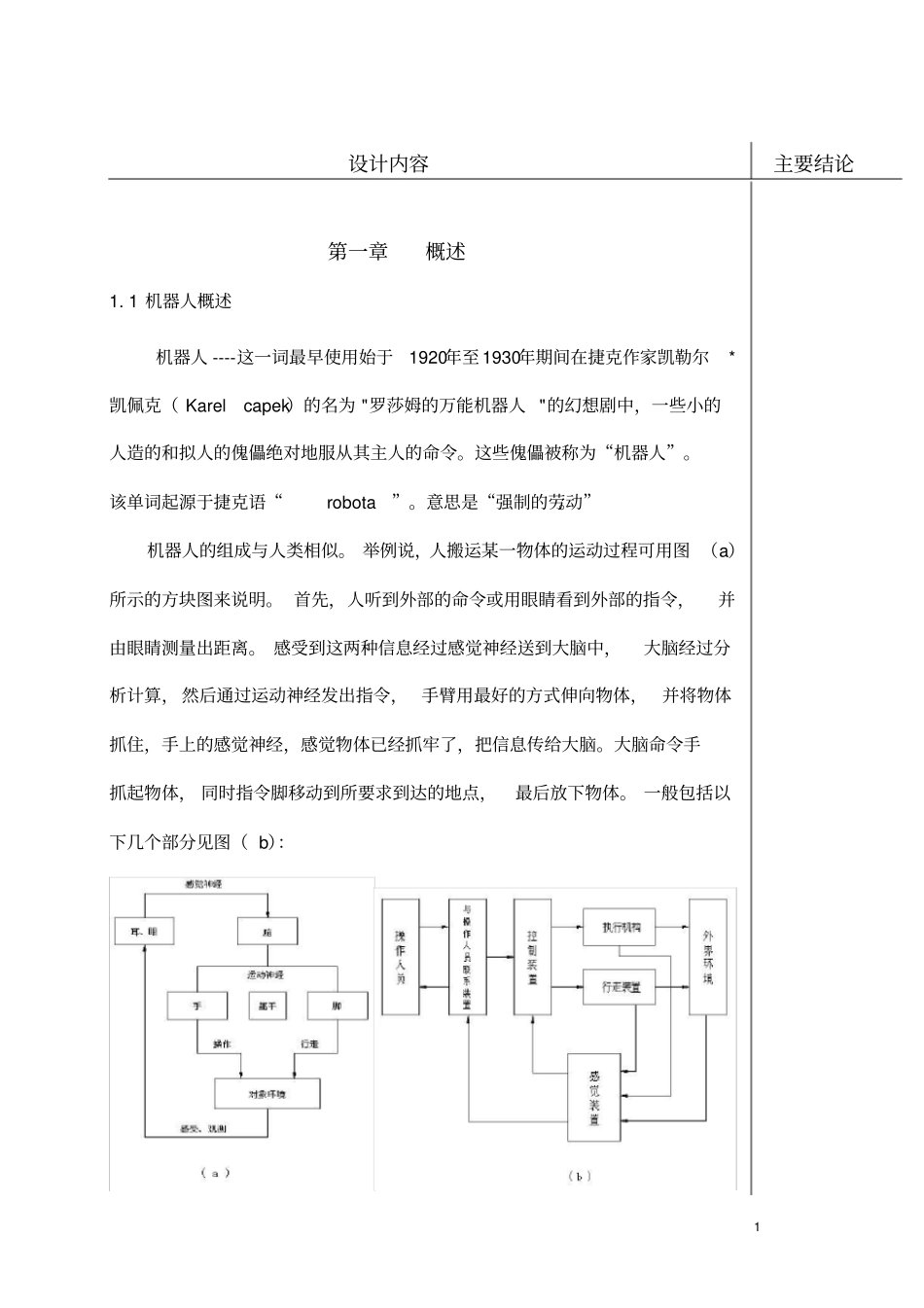
举例说,人搬运某一物体的运动过程可用图(a)所示的方块图来说明
首先,人听到外部的命令或用眼睛看到外部的指令,并由眼睛测量出距离
感受到这两种信息经过感觉神经送到大脑中,大脑经过分析计算,然后通过运动神经发出指令,手臂用最好的方式伸向物体,并将物体抓住,手上的感觉神经,感觉物体已经抓牢了,把信息传给大脑
大脑命令手抓起物体,同时指令脚移动到所要求到达的地点,最后放下物体
一般包括以下几个部分见图(b):设计内容主要结论21
控制中枢(相当于人的大脑);2
操作装置(相当于人的手);3
行走装置(相当于人的脚);4
有感觉的机器人还必须有感觉装置以及与外界环境联系的装置(相当于人的口、耳、眼、鼻以及皮肤上的感觉神经)
实际的机器人在不同的程度上具有两种特有的属性:对环境的通用性和自动适应性
①通用性:具有完成各种任务以及以不同的方式完成相同的结构或机械能力
这意味着机器人的机械结构具有可变的机械形状
②自动适应性:是指一个机器人必须被设计成由其自己去完成任务,尽管难以预知,但却可以有限的知道在完成任务期间环境的变化,通过改变路径、姿态等来处理所面对的问题,最终完成任务
为了对机器人进行分类,必须能够定义和区分不同的类型,因此根据不同的定义就有不同的分类方法
现在使用的有很多种
以下介绍日本工业机器人协会(JIRA)的分类方法:第一类:手工操作装置:一种由操作人员操作的具有若干个自由度(DOF)的装置;第二类:固定程序的机器人:依照预定