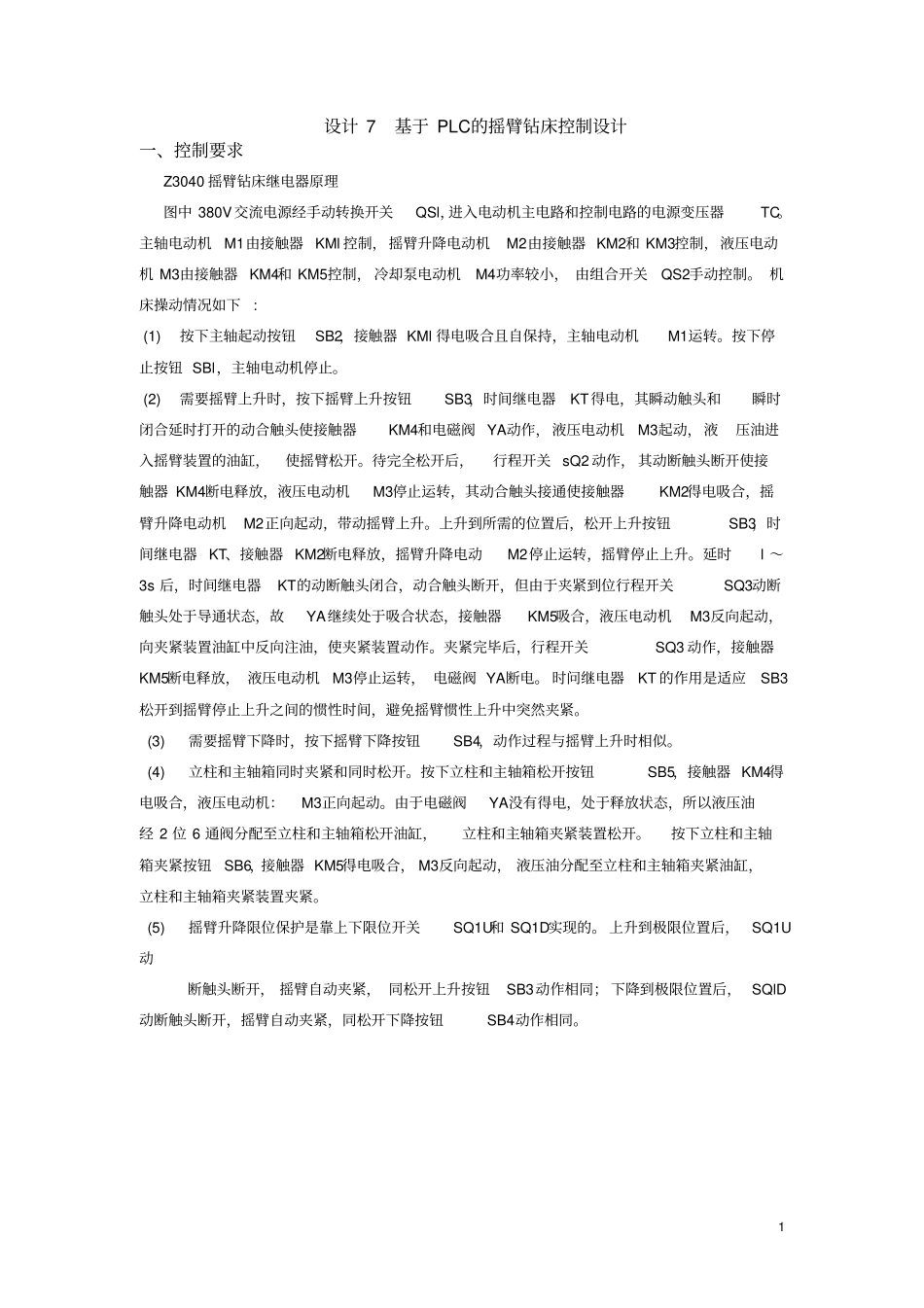
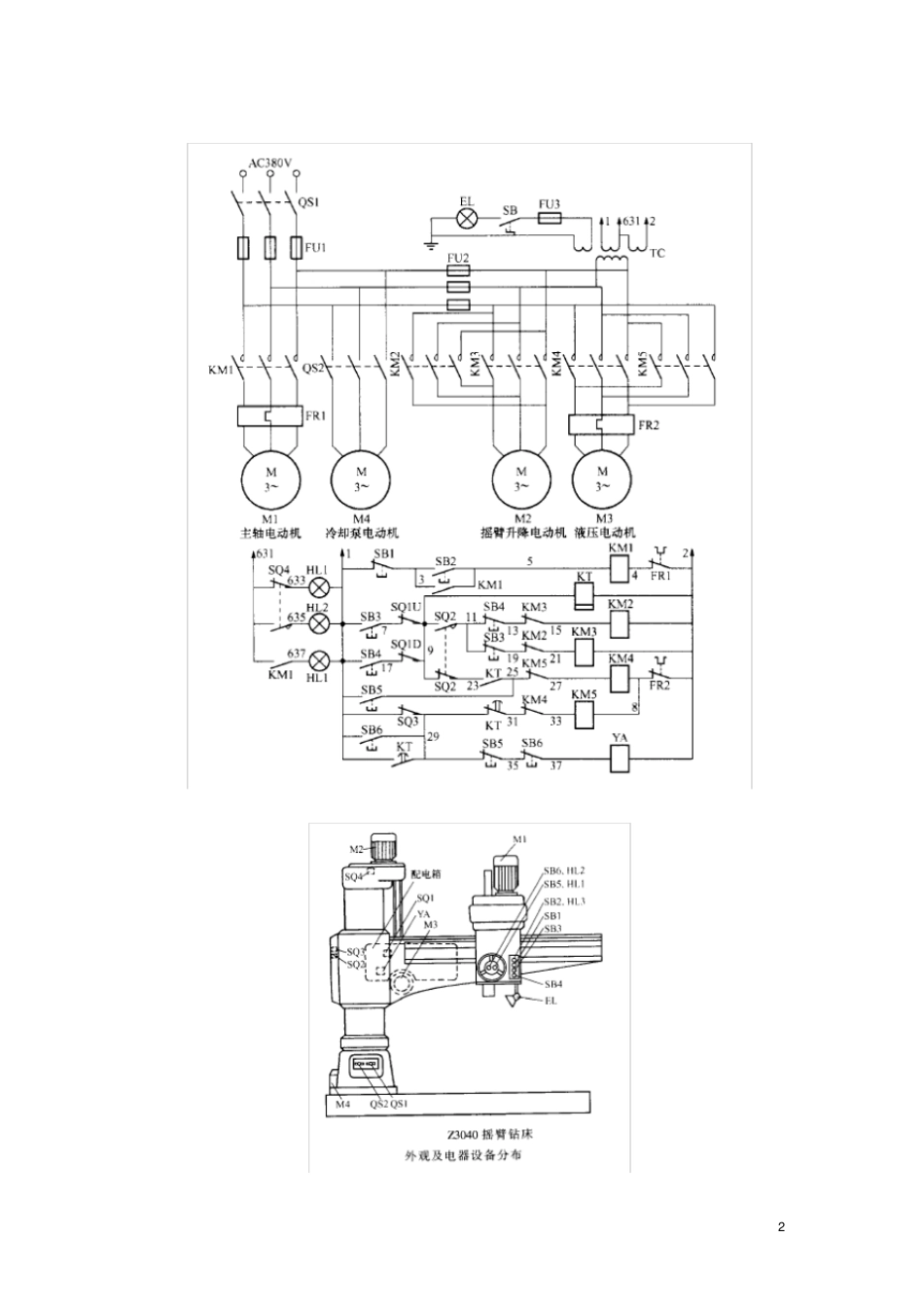
1设计7基于PLC的摇臂钻床控制设计一、控制要求Z3040摇臂钻床继电器原理图中380V交流电源经手动转换开关QSl,进入电动机主电路和控制电路的电源变压器TC
主轴电动机M1由接触器KMl控制,摇臂升降电动机M2由接触器KM2和KM3控制,液压电动机M3由接触器KM4和KM5控制,冷却泵电动机M4功率较小,由组合开关QS2手动控制
机床操动情况如下:(1)按下主轴起动按钮SB2,接触器KMl得电吸合且自保持,主轴电动机M1运转
按下停止按钮SBl,主轴电动机停止
(2)需要摇臂上升时,按下摇臂上升按钮SB3,时间继电器KT得电,其瞬动触头和瞬时闭合延时打开的动合触头使接触器KM4和电磁阀YA动作,液压电动机M3起动,液压油进入摇臂装置的油缸,使摇臂松开
待完全松开后,行程开关sQ2动作,其动断触头断开使接触器KM4断电释放,液压电动机M3停止运转,其动合触头接通使接触器KM2得电吸合,摇臂升降电动机M2正向起动,带动摇臂上升
上升到所需的位置后,松开上升按钮SB3,时间继电器KT、接触器KM2断电释放,摇臂升降电动M2停止运转,摇臂停止上升
延时l~3s后,时间继电器KT的动断触头闭合,动合触头断开,但由于夹紧到位行程开关SQ3动断触头处于导通状态,故YA继续处于吸合状态,接触器KM5吸合,液压电动机M3反向起动,向夹紧装置油缸中反向注油,使夹紧装置动作
夹紧完毕后,行程开关SQ3动作,接触器KM5断电释放,液压电动机M3停止运转,电磁阀YA断电
时问继电器KT的作用是适应SB3松开到摇臂停止上升之间的惯性时间,避免摇臂惯性上升中突然夹紧
(3)需要摇臂下降时,按下摇臂下降按钮SB4,动作过程与摇臂上升时相似
(4)立柱和主轴箱同时夹紧和同时松开
按下立柱和主轴箱松开按钮SB5,接触器KM4得电吸合,液压电动机:M3正向起动
由于电磁阀YA没有得电,处于释放状态,所以液压