阀控液压马达速度伺服系统仿真分析引言阀控液压马达速度伺服系统的负载具有较大的惯性和很小的阻尼,其传递函数常可近似由一对实部为零的极点组成,并有很低的动态响应,由于负载处在系统的闭环之中,所以它对阀控液压马达的动态品质有很大的影响
此外,系统的负载常是可变的,系统设计只能针对一种特定负载,负载一旦改变,系统的动态品质就会变坏,有时甚至失去稳定性,严重的影响了伺服系统的跟踪性能
本文主要针对干扰力矩对系统的影响,利用结构不变性原理,消除干扰力矩对系统的影响,同时利用PID控制理论来提高系统的动态性能
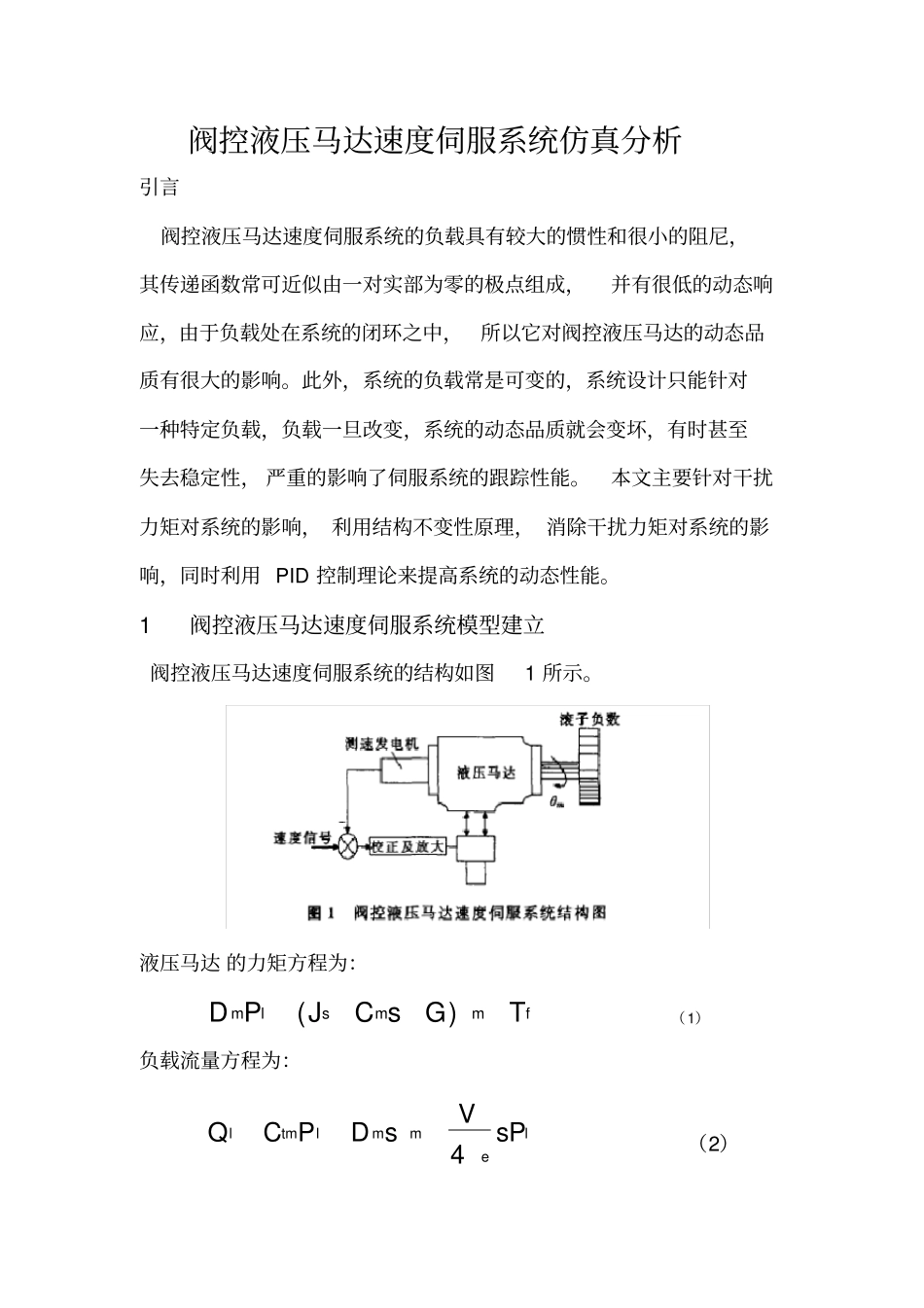
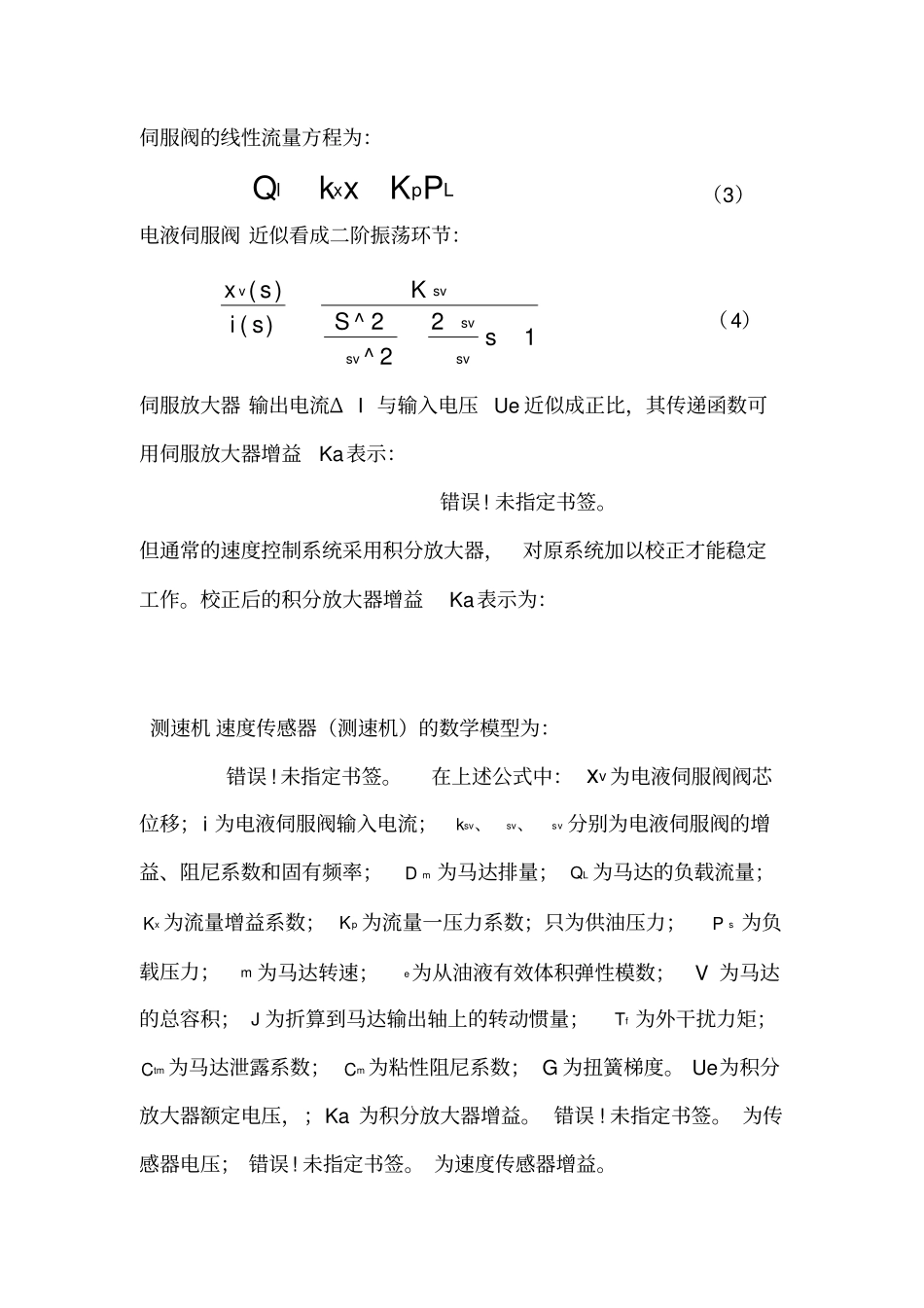
1阀控液压马达速度伺服系统模型建立阀控液压马达速度伺服系统的结构如图1所示
液压马达的力矩方程为:fmmslmTGsCJP)(D(1)负载流量方程为:lemmltmlsPVsDPC4Q(2)伺服阀的线性流量方程为:LpxlPKxkQ(3)电液伺服阀近似看成二阶振荡环节:122^2^)()(sSKsisxsvsvsvsvv(4)伺服放大器输出电流ΔI与输入电压Ue近似成正比,其传递函数可用伺服放大器增益Ka表示:错误
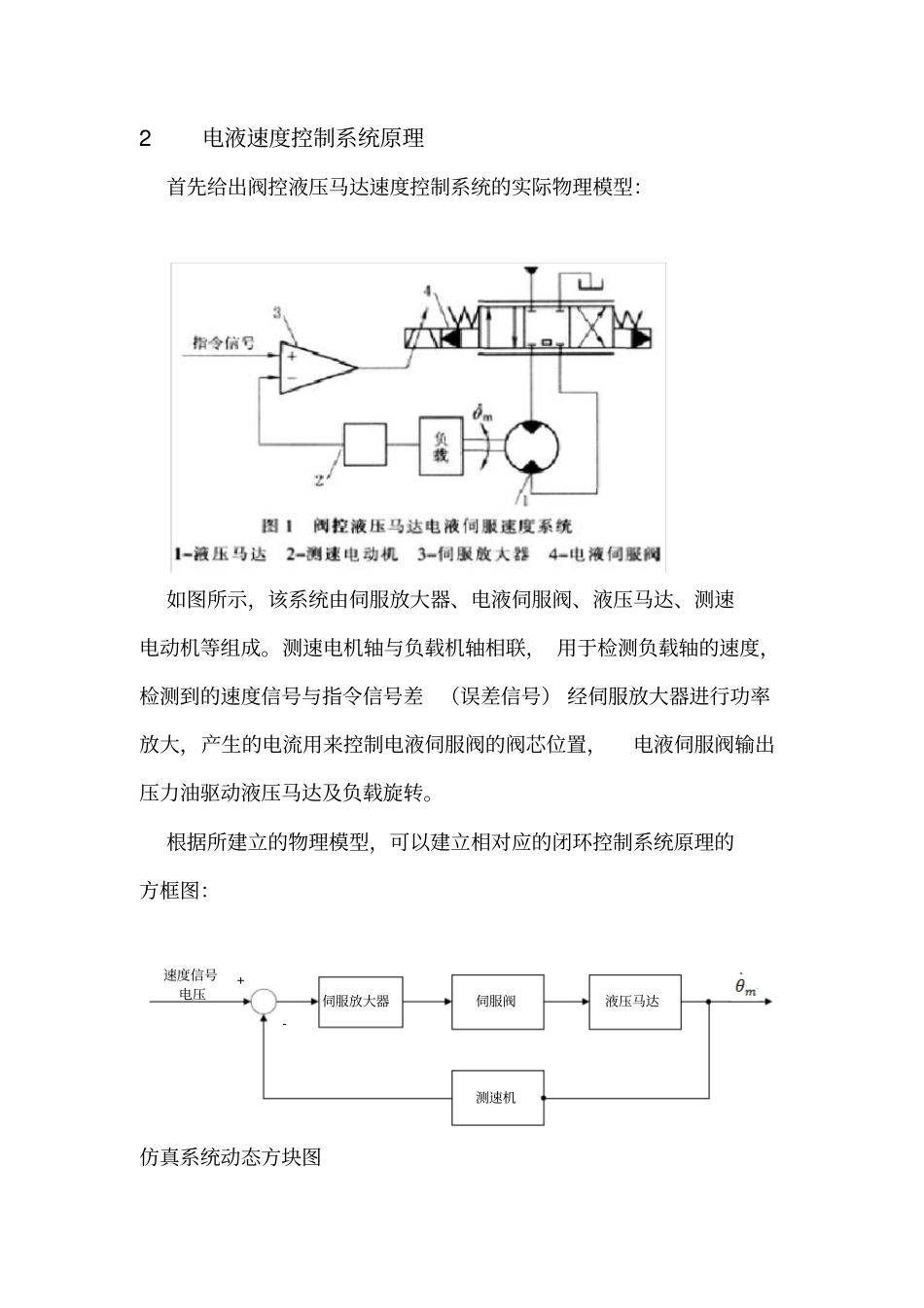
但通常的速度控制系统采用积分放大器,对原系统加以校正才能稳定工作
校正后的积分放大器增益Ka表示为:测速机速度传感器(测速机)的数学模型为:错误
在上述公式中:vx为电液伺服阀阀芯位移;i为电液伺服阀输入电流;vsvkssv、、分别为电液伺服阀的增益、阻尼系数和固有频率;mD为马达排量;LQ为马达的负载流量;xK为流量增益系数;pK为流量一压力系数;只为供油压力;sP为负载压力;m为马达转速;e为从油液有效体积弹性模数;V为马达的总容积;J为折算到马达输出轴上的转动惯量;fT为外干扰力矩;tmC为马达泄露系数;mC为粘性阻尼系数;G为扭簧梯度
Ue为积分放大器额定电压,;Ka为积分放大器增益
为传感器电压;错误