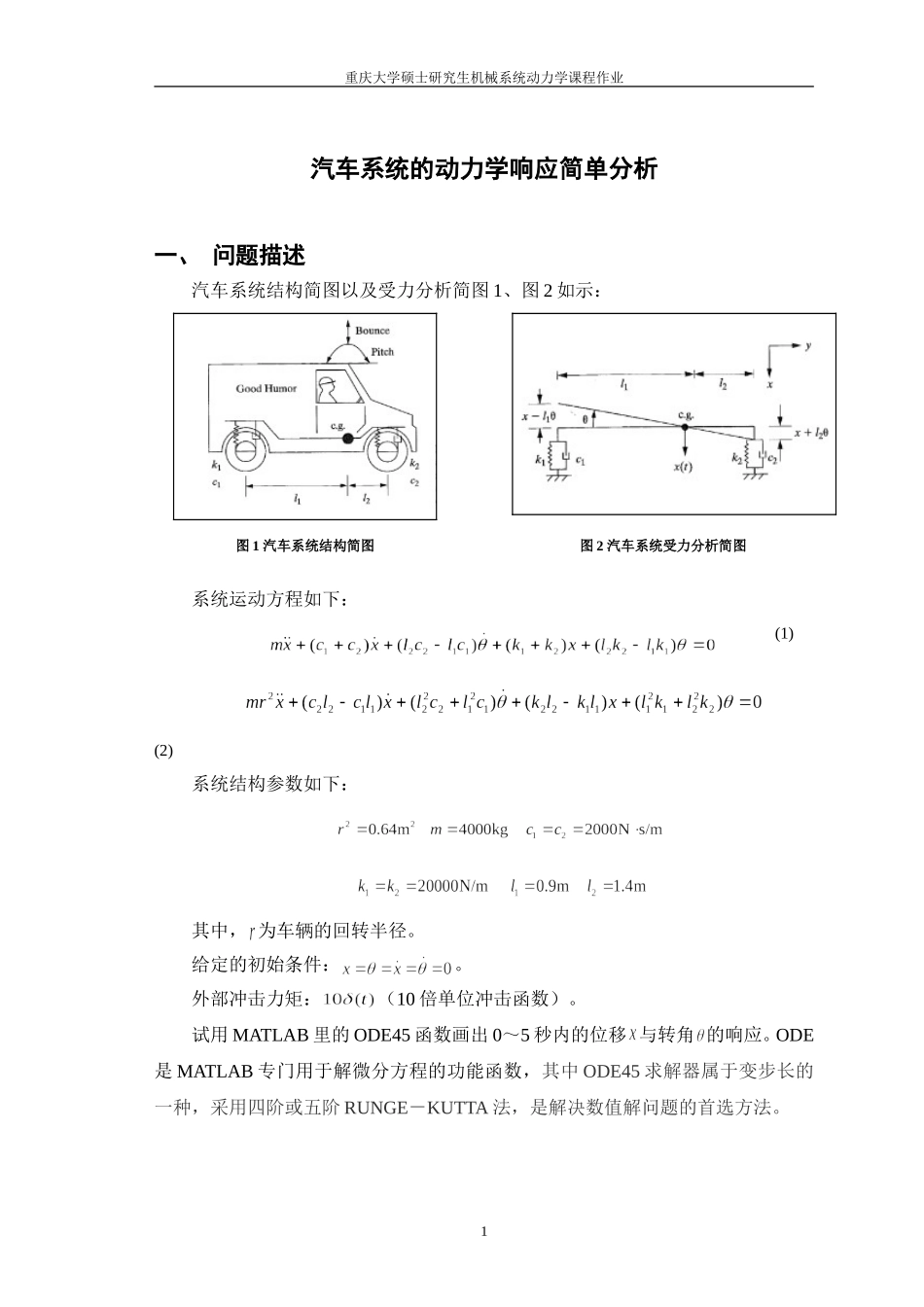
重庆大学硕士研究生机械系统动力学课程作业汽车系统的动力学响应简单分析小组成员:李航,王青松,田文昌,谢道坤学号:20150713058t,20150702040,20150702036,20150702051指导教师:何荇兮学院:机械工程学院专业:机械工程班级:传动3班重庆大学重庆大学硕士研究生机械系统动力学课程作业二O一五年十一月21重庆大学硕士研究生机械系统动力学课程作业汽车系统的动力学响应简单分析一、问题描述汽车系统结构简图以及受力分析简图1、图2如示:图1汽车系统结构简图图2汽车系统受力分析简图系统运动方程如下:(1)(2)系统结构参数如下:其中,为车辆的回转半径
给定的初始条件:
外部冲击力矩:(10倍单位冲击函数)
试用MATLAB里的ODE45函数画出0~5秒内的位移与转角的响应
ODE是MATLAB专门用于解微分方程的功能函数,其中ODE45求解器属于变步长的一种,采用四阶或五阶RUNGE-KUTTA法,是解决数值解问题的首选方法
2重庆大学硕士研究生机械系统动力学课程作业二、求解方法已知汽车的运动学方程,在t=0时,存在一个冲击力矩,此时运动学方程表示为:(3)(4)冲击函数的定义:本算例中的冲击函数为一个分步函数,由于时间的非负性,冲击函数的定义为:根据题目给出的结构参数和初始条件,通过MATLAB中的函数编写程序求解添加了冲击的运动学方程得出结果,并画出0~5秒内汽车系统的位移与转角的响应图
三、求解过程MATLAB中的编程思路及过程如下:首先将运动学方程写成一阶常微分方程组形式:t=0时:t>0时:在MATLAB里的ODE45函数编写计算主程序,如下所示:clc;clear;t0=0;tf=5;%0