现代汽车转向技术第第11节概述节概述★转向系统的功能和组成功能转向系统不仅可改变汽车行驶方向,而且可克服由于路面的侧向干扰力使车轮自行产生的转向,恢复汽车原来的行驶方向
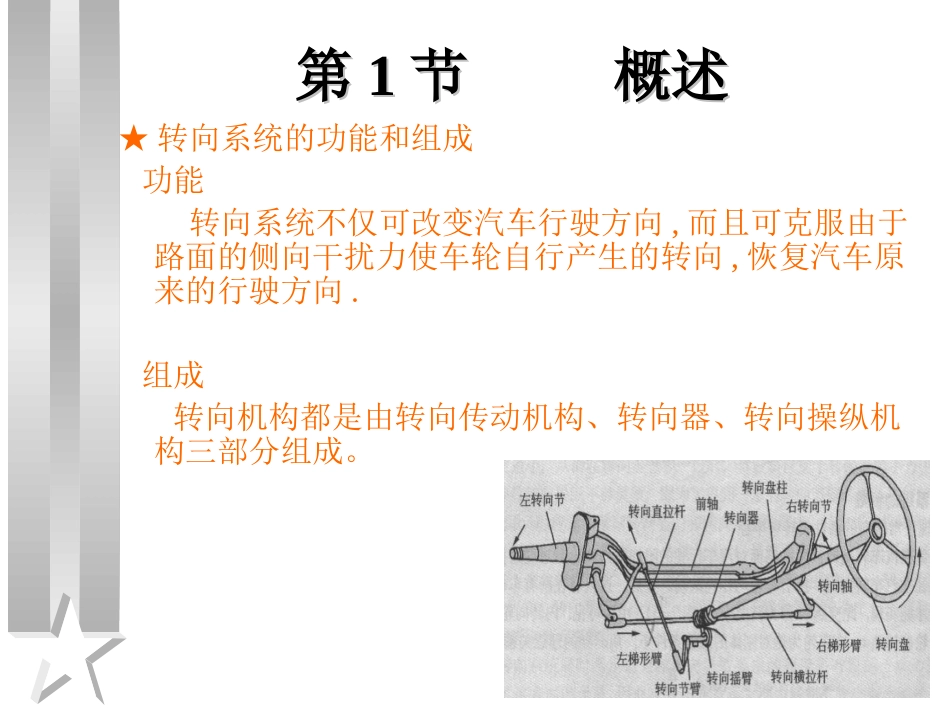
组成转向机构都是由转向传动机构、转向器、转向操纵机构三部分组成
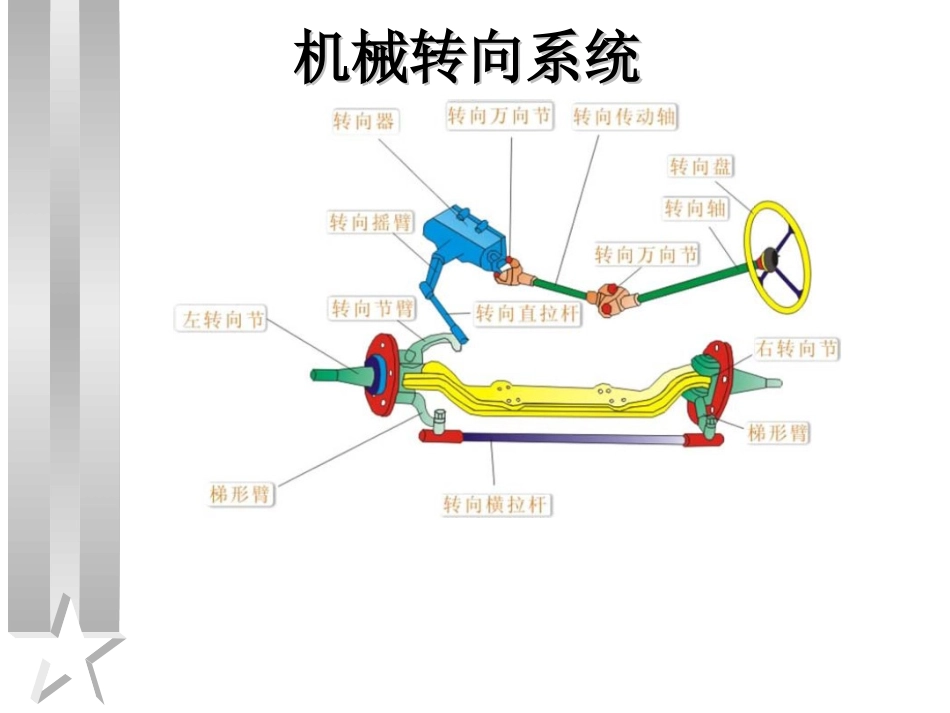
机械转向系统机械转向系统现代汽车转向机构的设计的趋势:①适应汽车高速行驶的需要
从操纵轻便性和稳定性、安全行驶的角度,广泛使用更先进的工艺方法制造;使用变速比转向器、高刚性转向器
“变速比和高刚性”是目前世界上生产的转向器结构的方向
②充分考虑安全、轻便性
随着汽车高速化、驾驶人员非职业化、车流密集化,驾驶员和乘客的安全非常重要,目前国内外在许多汽车上已普遍增设能量吸收装置,如防碰撞安全转向柱、安全带、安全气囊等,并逐步推广
从人机工程学考虑操纵轻便性,已逐步采用可调整的转向管柱和动力转向系统
③低成本、低油耗、大批量专业化生产
随着国际经济形势的恶化,石油危机造成经济衰退,在汽车生产中愈来愈重视经济性,设计低成本、低油耗的汽车和低成本的合理化生产线,尽量实现大批量专业化生产
在零部件生产,特别是转向器的生产上,更是表现突出
④汽车转向器装置的电子化
未来汽车的转向器装置,必定是以电子化为唯一的发展途径
为减轻转向盘的操纵力,很多汽车都装有动力转向装置(PS—PowerSteering)
近年来,在很多汽车的转向装置中都采用了液力和电动式转向助力装置,构成动力转向系统
从20世纪80年代起国外就开始陆续采用四轮转向系统(4WS——4WheelSteering),目的是改善整车的转向特性和响应特性,低速时改善车辆的操纵轻便性,高速时改善车辆的稳定性
第第22节电动助力转向系统节电动助力转向系统一、组成和工作原理一、组成和工作原理二、分类二、分类•电动助力转向系统减轻汽车低速行驶时的转向操纵力,提高汽车高速行驶时的转向稳定性
三、关键部件三、关键