伺服系统的参数调整和性能指标试验1伺服系统的参数调整理论基础伺服系统包括三个反馈回路(位置回路、速度回路以及电流回路)
最内环回路的反应速度最快,中间环节的反应速度必须高于最外环
假使未遵守此原则,将会造成震动或反应不良
伺服驱动器的设计可确保电流回路具备良好的反应效能
用户只需调整位置回路与速度回路增益
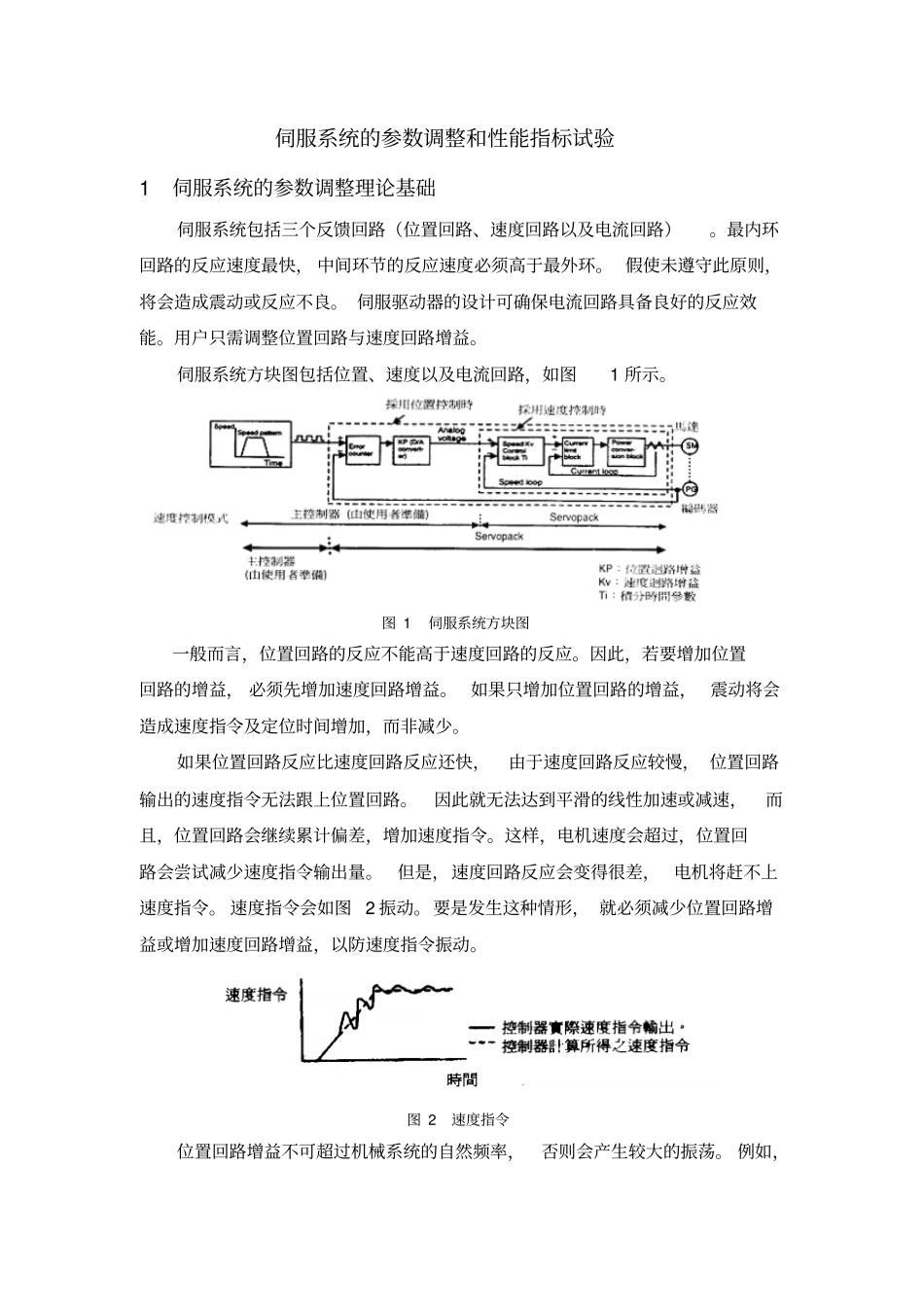
伺服系统方块图包括位置、速度以及电流回路,如图1所示
图1伺服系统方块图一般而言,位置回路的反应不能高于速度回路的反应
因此,若要增加位置回路的增益,必须先增加速度回路增益
如果只增加位置回路的增益,震动将会造成速度指令及定位时间增加,而非减少
如果位置回路反应比速度回路反应还快,由于速度回路反应较慢,位置回路输出的速度指令无法跟上位置回路
因此就无法达到平滑的线性加速或减速,而且,位置回路会继续累计偏差,增加速度指令
这样,电机速度会超过,位置回路会尝试减少速度指令输出量
但是,速度回路反应会变得很差,电机将赶不上速度指令
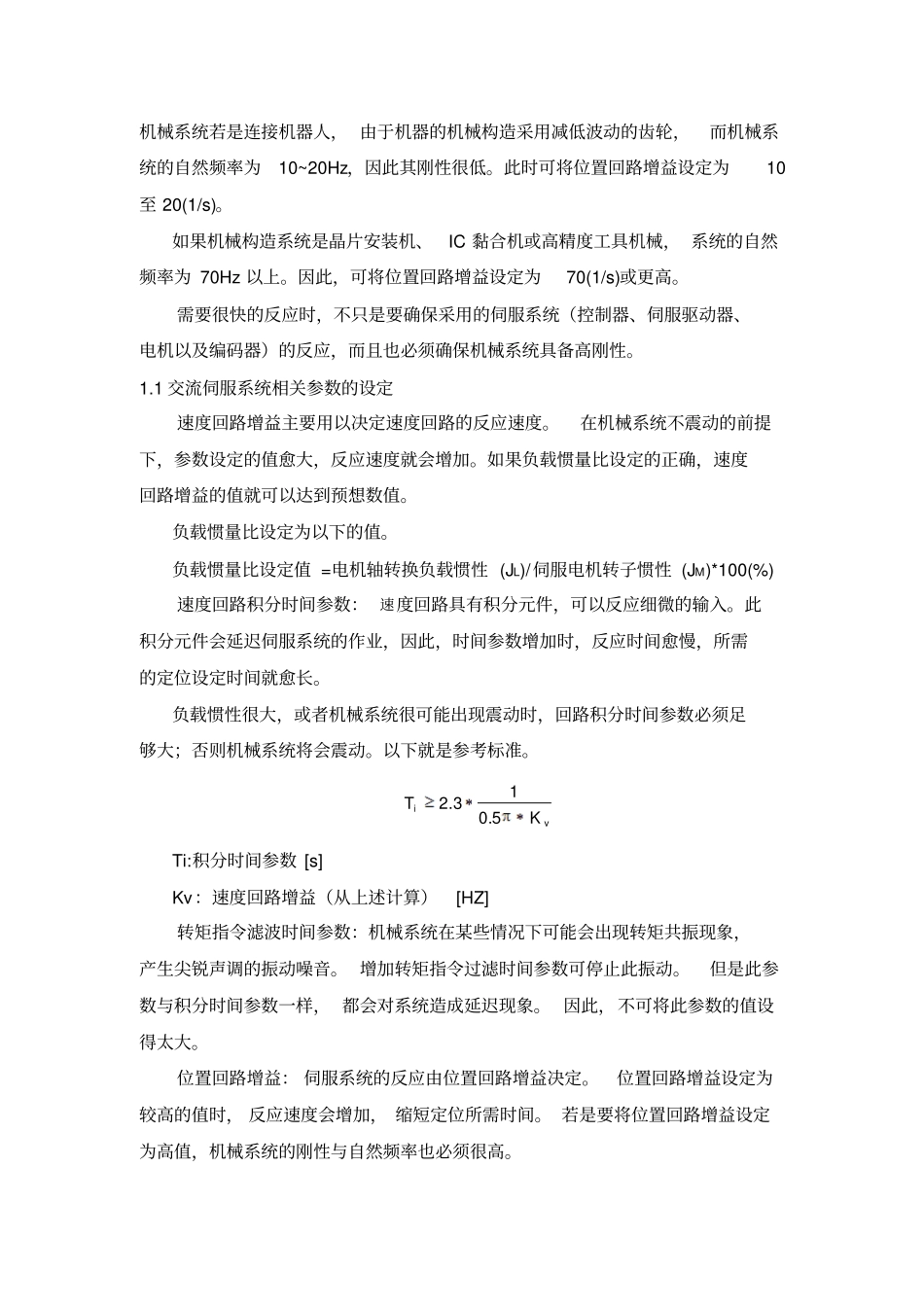
速度指令会如图2振动
要是发生这种情形,就必须减少位置回路增益或增加速度回路增益,以防速度指令振动
图2速度指令位置回路增益不可超过机械系统的自然频率,否则会产生较大的振荡
例如,机械系统若是连接机器人,由于机器的机械构造采用减低波动的齿轮,而机械系统的自然频率为10~20Hz,因此其刚性很低
此时可将位置回路增益设定为10至20(1/s)
如果机械构造系统是晶片安装机、IC黏合机或高精度工具机械,系统的自然频率为70Hz以上
因此,可将位置回路增益设定为70(1/s)或更高
需要很快的反应时,不只是要确保采用的伺服系统(控制器、伺服驱动器、电机以及编码器)的反应,而且也必须确保机械系统具备高刚性
1交流伺服系统相关参数的设定速度回路增益主要用以决定速度回路的反应速度
在机械系统不震动的前提下,参数设定的值愈大,反应速度就会增加
如果负载惯量比设