电子齿轮比参数设置1
1参数介绍所谓“电子齿轮”功能,主要有两方面的应用:一是调整电机旋转1圈所需要的指令脉冲数,以保证电机转速能够达到需求转速
例如上位机PLC最大发送脉冲频率为200KHz,若不修改电子齿轮比,则电机旋转1圈需要10000个脉冲,那么电机最高转速为1200rpm,若将电子齿轮比设为2:1,或者将每转脉冲数设定为5000,则此时电机可以达到2400rpm转速
例如:电子齿轮比设为1:1或者每转脉冲数设为10000,上位机PLC最高发送脉冲频率为200KHz
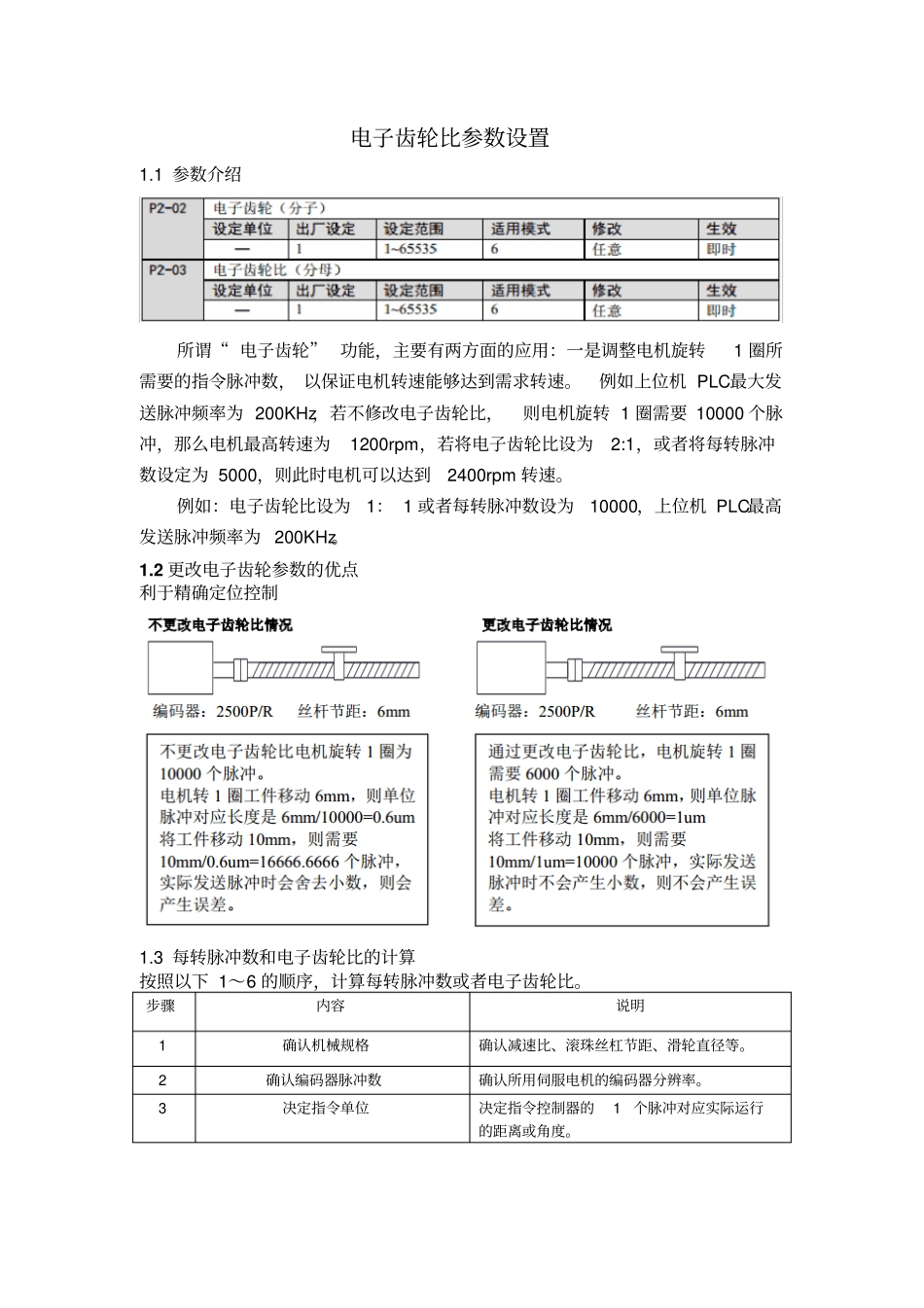
2更改电子齿轮参数的优点利于精确定位控制1
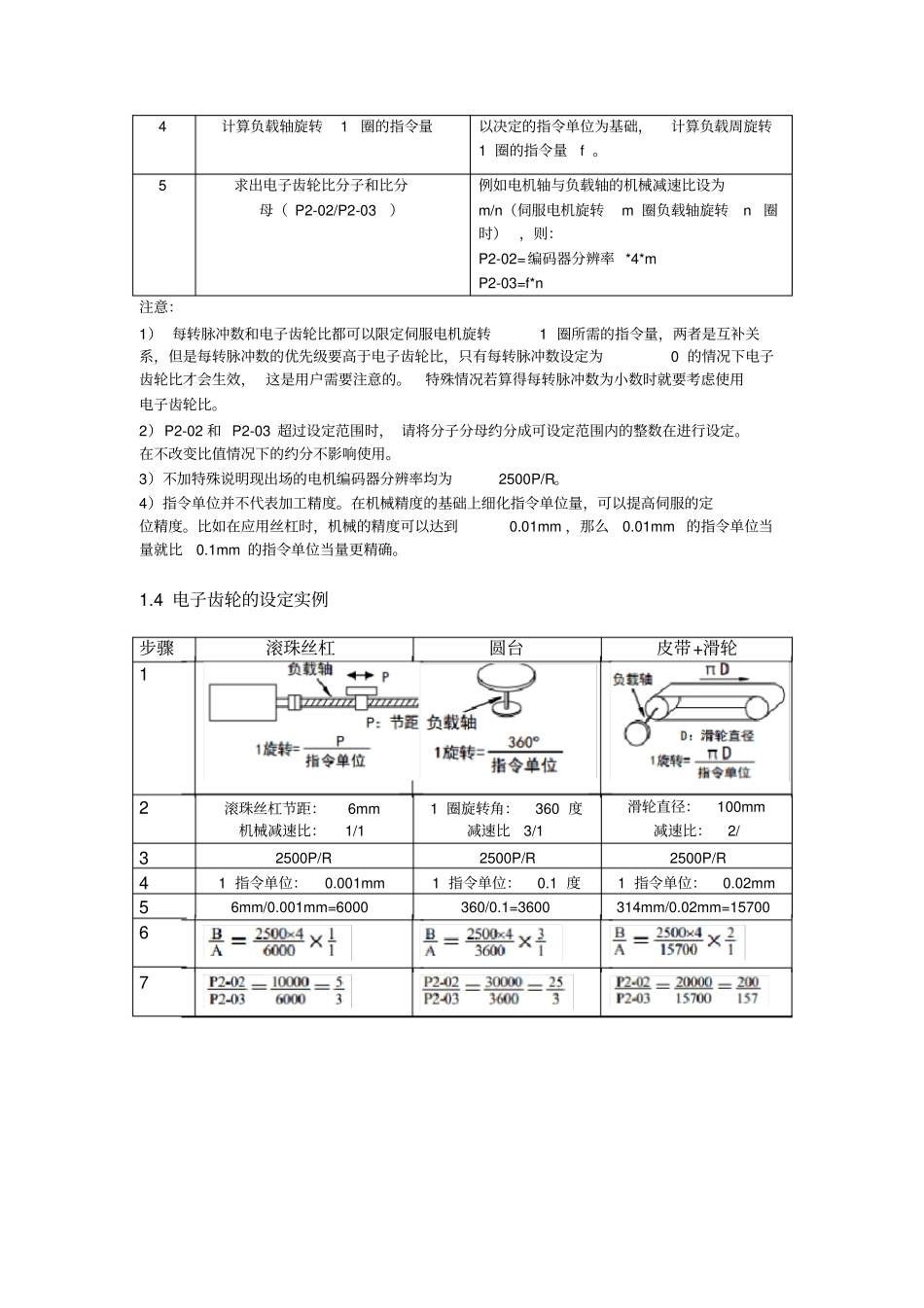
3每转脉冲数和电子齿轮比的计算按照以下1~6的顺序,计算每转脉冲数或者电子齿轮比
步骤内容说明1确认机械规格确认减速比、滚珠丝杠节距、滑轮直径等
2确认编码器脉冲数确认所用伺服电机的编码器分辨率
3决定指令单位决定指令控制器的1个脉冲对应实际运行的距离或角度
4计算负载轴旋转1圈的指令量以决定的指令单位为基础,计算负载周旋转1圈的指令量f
5求出电子齿轮比分子和比分母(P2-02/P2-03)例如电机轴与负载轴的机械减速比设为m/n(伺服电机旋转m圈负载轴旋转n圈时),则:P2-02=编码器分辨率*4*mP2-03=f*n注意:1)每转脉冲数和电子齿轮比都可以限定伺服电机旋转1圈所需的指令量,两者是互补关系,但是每转脉冲数的优先级要高于电子齿轮比,只有每转脉冲数设定为0的情况下电子齿轮比才会生效,这是用户需要注意的
特殊情况若算得每转脉冲数为小数时就要考虑使用电子齿轮比
2)P2-02和P2-03超过设定范围时,请将分子分母约分成可设定范围内的整数在进行设定
在不改变比值情况下的约分不影响使用
3)不加特殊说明现出场的电机编码器分辨率均为2500P/R
4)指令单位并不代表加工精度
在机械精度的基础上细化指令单位量,可以提高伺服的定位精度
比如在应用丝杠时