实验报告课程线性系统理论基础实验日期2016年6月6日专业班级学号同组人实验名称全维状态观测器的设计评分批阅教师签字一、实验目的1
学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的极点对状态的估计误差的影响;2
掌握全维状态观测器的设计方法;3
掌握带有状态观测器的状态反馈系统设计方法
二、实验容开环系统cxybuAxx,其中0100001,0,10061161Abca)用状态反馈配置系统的闭环极点:5,322j;b)设计全维状态观测器,观测器的极点为:10,325j;c)研究观测器极点位置对估计状态逼近被估计值的影响;d)求系统的传递函数(带观测器及不带观测器时);
绘制系统的输出阶跃响应曲线
三、实验环境MATLAB6
5四、实验原理(或程序框图)及步骤利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件是必须对全部状态变量都能进行测量,但在实际系统中,并不是所有状态变量都能测量的,这就给状态反馈的实现造成了困难
因此要设法利用已知的信息(输出量y和输入量x),通过一个模型重新构造系统状态以对状态变量进行估计
该模型就称为状态观测器
若状态观测器的阶次与系统的阶次是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器
设系统完全可观,则可构造如图4-1所示的状态观测器图4-1全维状态观测器为求出状态观测器的反馈ke增益,与极点配置类似,也可有两种方法:方法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出ke;方法二:是可采用Ackermann公式:
ToeQAk1000)(1,其中OQ为可观性矩阵
利用对偶原理,可使设计问题大为简化
首先构造对偶系统TTTbvcA然后可由变换法或Ackermann公式求出极点配置的反馈k增益,这也可由MATLAB的place和acker函数得到;最后求出状态观测器的反馈增益
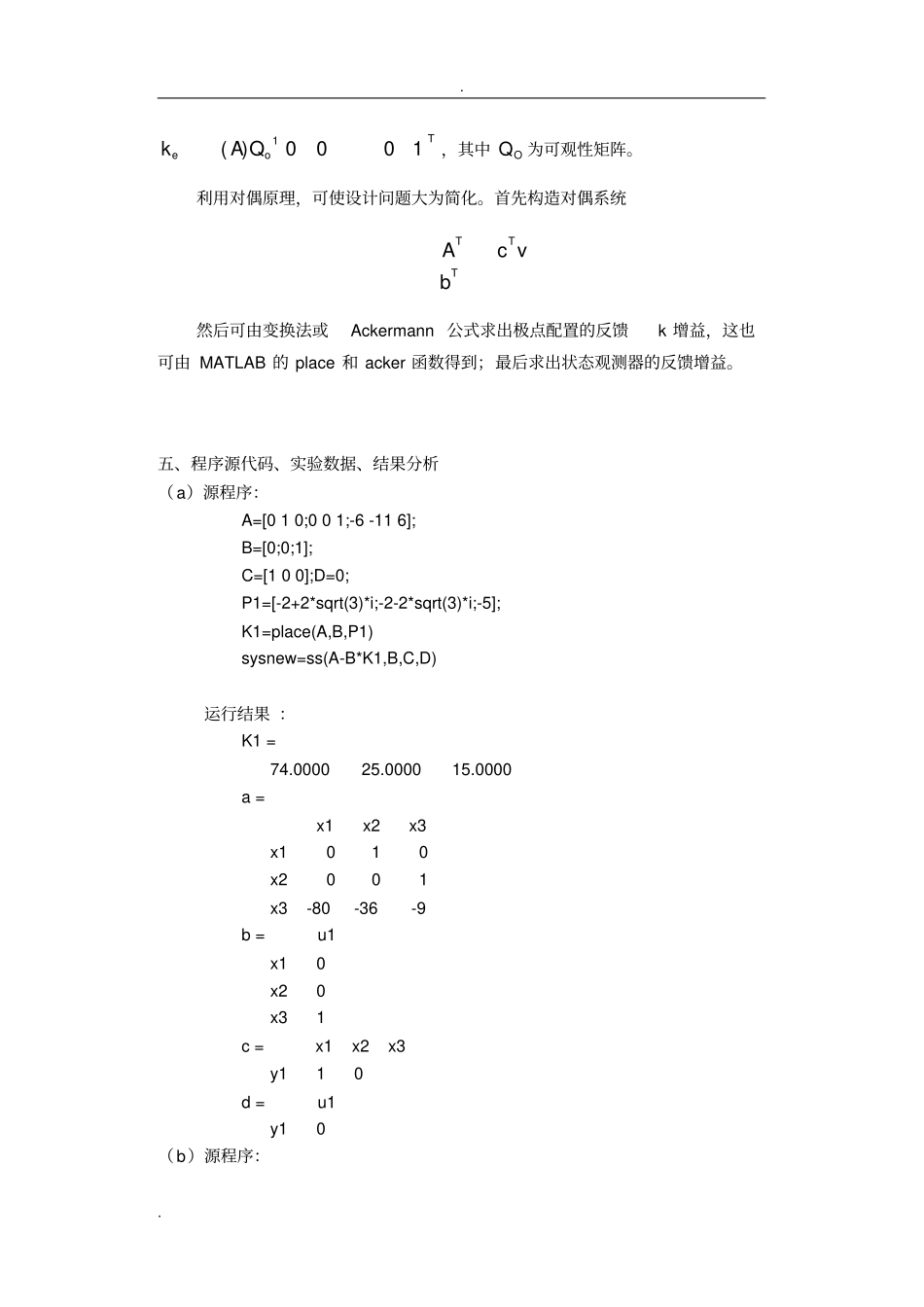
五、程序源代码