重庆大学研究生学位论文选题报告及论文工作实施计划学院:研究生院专业:控制工程名:学位级别:工程硕士指导老师:2013 年 6 月输电线路除冰机器人的设计1 研究目的意义以及国内外研究概况1・1 研究目的及意义在输变电工程中,输电线路覆冰是高压线路的安全运行的重大隐患之一
输电线路覆冰可引起导线舞动、杆塔倾斜、倒塌、断线及绝缘子闪络等问题⑴,从而导致通信中断或大面积停电
然而,目前解决输电线路覆冰的主要措施是以预防为主,紧急情况下大多数采用人工除冰的方式强制使输电线表面的覆冰脱落
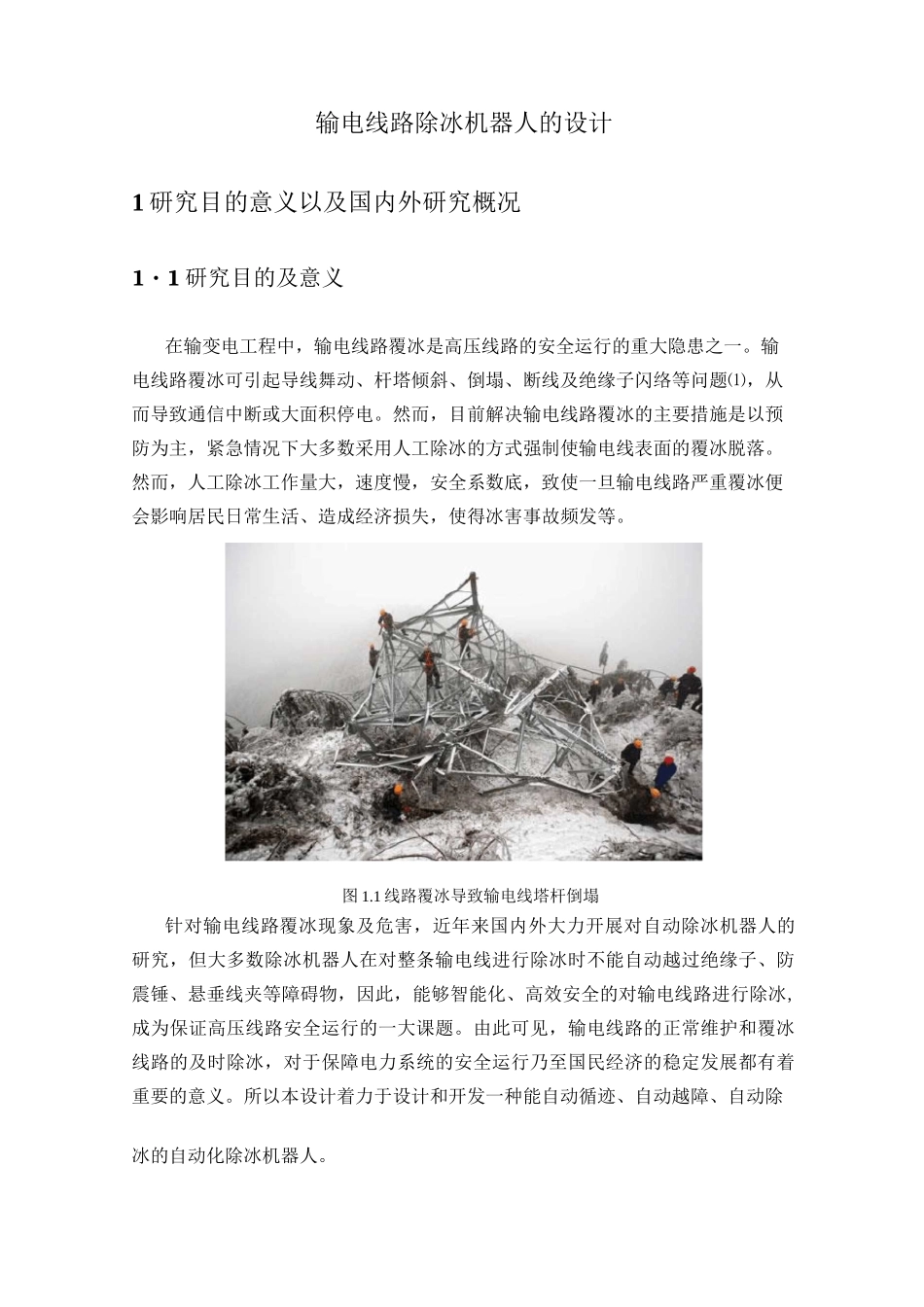
然而,人工除冰工作量大,速度慢,安全系数底,致使一旦输电线路严重覆冰便会影响居民日常生活、造成经济损失,使得冰害事故频发等
1 线路覆冰导致输电线塔杆倒塌针对输电线路覆冰现象及危害,近年来国内外大力开展对自动除冰机器人的研究,但大多数除冰机器人在对整条输电线进行除冰时不能自动越过绝缘子、防震锤、悬垂线夹等障碍物,因此,能够智能化、高效安全的对输电线路进行除冰,成为保证高压线路安全运行的一大课题
由此可见,输电线路的正常维护和覆冰线路的及时除冰,对于保障电力系统的安全运行乃至国民经济的稳定发展都有着重要的意义
所以本设计着力于设计和开发一种能自动循迹、自动越障、自动除冰的自动化除冰机器人
2 国内外研究现状1
1 国外技术研究现状在输电线除冰机器人的研究领域中,美国 TRC 公司早在 1989 年便研制了自治寻线机器人原型,该机器人不仅能沿架空导线上远距离爬行,还能执行电晕损耗、绝缘子、结合点、压接头等视觉检查任务,并能对探测到的线路故障数据预处理后,传送给地面工作人员,当机器人遇到塔杆时,利用手臂采用仿人攀援的方式从侧面越过塔杆[2]
同年,日本东京电力公司研制出寻线机器人,该寻线机器人能挂钩在架空输电线路上行走,具有跨越防震锤,塔杆等各种障碍的功能⑶
在 2000 年,加拿大魁北克