实验器材: ASDA-A2 DVP-20EH 定义外部端子 (SHM)启动原点回归 :PT PR 模式下都可以,通过伺服内参数定义原点回归1
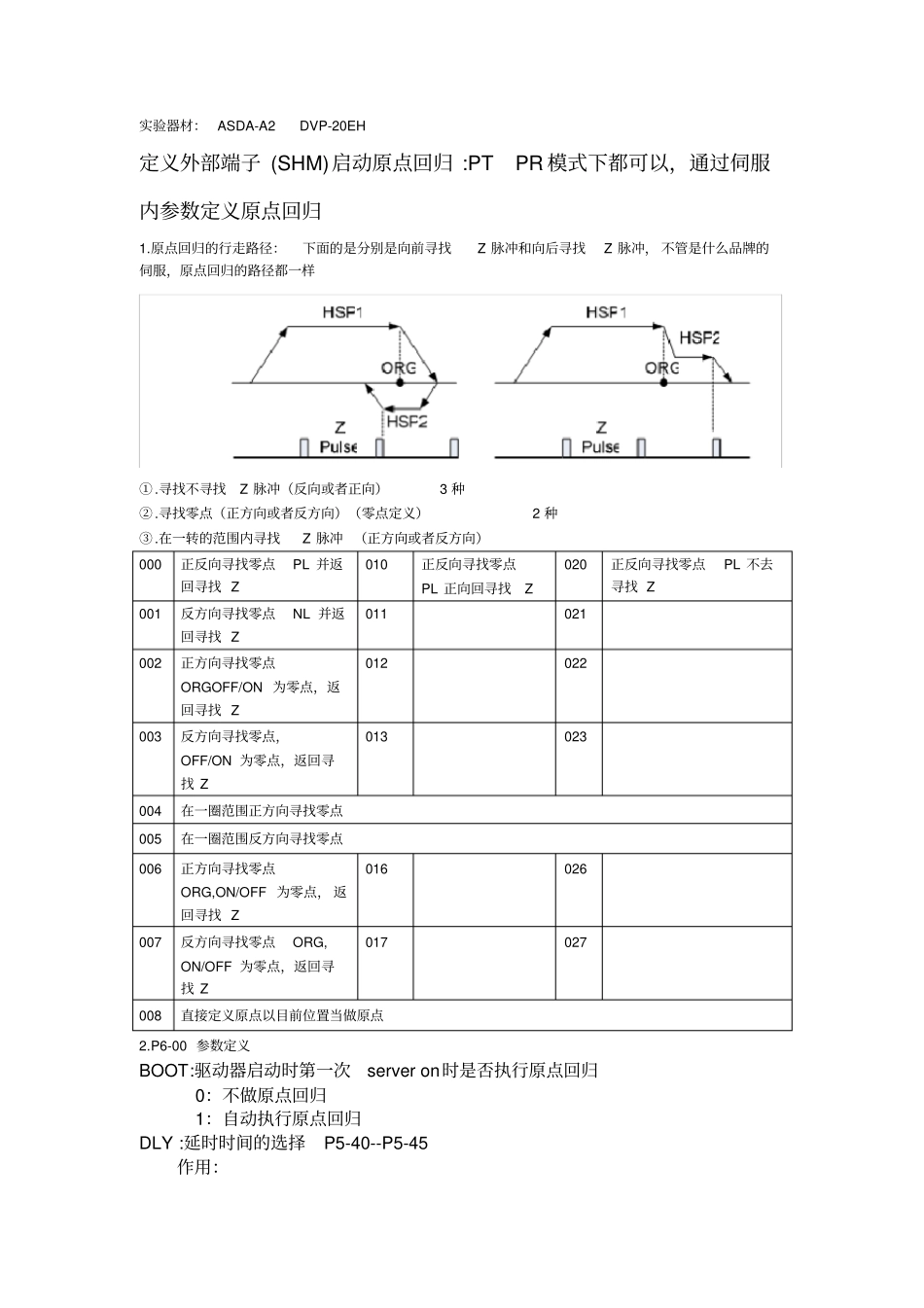
原点回归的行走路径:下面的是分别是向前寻找Z 脉冲和向后寻找Z 脉冲, 不管是什么品牌的伺服,原点回归的路径都一样①
寻找不寻找Z 脉冲(反向或者正向)3 种②
寻找零点(正方向或者反方向)(零点定义)2 种③
在一转的范围内寻找Z 脉冲 (正方向或者反方向)000 正反向寻找零点PL 并返回寻找 Z 010 正反向寻找零点PL 正向回寻找Z 020 正反向寻找零点PL 不去寻找 Z 001 反方向寻找零点NL 并返回寻找 Z 011 021 002 正方向寻找零点ORGOFF/ON 为零点,返回寻找 Z 012 022 003 反方向寻找零点,OFF/ON 为零点,返回寻找 Z 013 023 004 在一圈范围正方向寻找零点005 在一圈范围反方向寻找零点006 正方向寻找零点ORG,ON/OFF 为零点, 返回寻找 Z 016 026 007 反方向寻找零点ORG, ON/OFF 为零点,返回寻找 Z 017 027 008 直接定义原点以目前位置当做原点2
P6-00 参数定义BOOT:驱动器启动时第一次server on时是否执行原点回归0:不做原点回归1:自动执行原点回归DLY :延时时间的选择P5-40--P5-45 作用:DEC1/DEC2 :第一 /二段回原点减速时间的选择P5-40--P5-55 ACC :加速时间的选择对应到 P20--P35 PATH :路径的形式0:原点回归后停止1-63:原点回归后,执行指定的路径作用:可以让电机回到原点后,再移动的位置原点回归牵涉到的其它的参数:P5-05:第一段高速原点回归速度的设定P5-06:第二段高度原点回归速度的设定P1-01:01 PR 64个命令程序,程序C#0