第一章 三维超声的成像原理 宇宙空间包含有三个互相垂直的方向,即X、Y 和Z 方向
单一方向只能描述一条直线,而任何两个垂直的方向都可以描述一个平面,三个互相垂直的方向则可以描述一个立体,它们相应提供空间的一维、二维和三维信息
超声成像(Ultrasonic Imaging)是使用超声波的声成像
在超声诊断仪中,有传递人体组织一维空间信息的A 型、M 型和D 型;有传递人体组织二维空间信息的B 型、C 型、F 型和CFM 型(彩色血流图);有传递人体组织三维空间信息的组织三维成像、血流三维成像和融合三维成像
目前,所有三维成像都是以平面显示的方法显现成具有立体感的显示方式,这种方式被称为三维显示(3D-scope)
第一节 三维成像的原理及基本方法 一
三维成像的原理 三维成像按成像的原理可分为三大类: 1. 利用光学原理与系统进行三维成像; 2. 利用光学系统和图像迭加原理的三维成像; 3. 利用计算机辅助进行三维重建成像
二.声全息(Acoustical Holography) 声全息技术是通过探测波与参考波之间的相互干涉,而把探测波振幅和相位携带的有关探测物结构的全部信息提取与再现的技术
声全息技术由于获取和记录全息数据的方式不同,可分为三类: 液面全息; 扫描全息; 布阵全息
不管哪一类,都是透射成像,并沿用了激光全息的方法,利用超声波相干的特性,不仅把超声波振幅信息记录下来,也反映出相位信息
因此,在把超声全息图重现时
能逼真地显示出人体的内部结构,并具有实时动态、分辨率高和灰阶丰富等特点
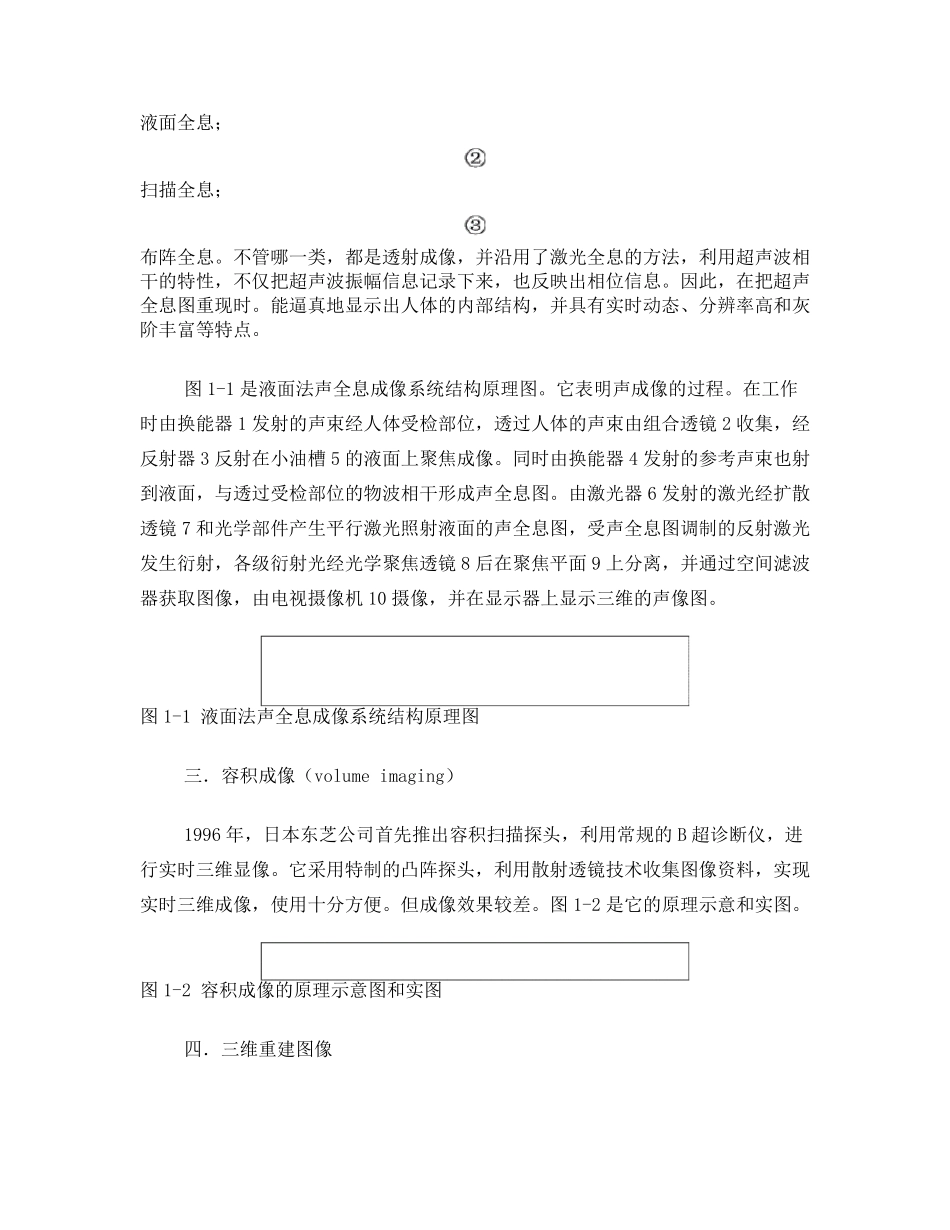
图1-1 是液面法声全息成像系统结构原理图
它表明声成像的过程
在工作时由换能器1 发射的声束经人体受检部位,透过人体的声束由组合透镜2 收集,经反射器3 反射在小油槽5 的液面上聚焦成像
同时由换能器4 发射的参考声束也射到液面,与透过受检部位的物波相干形成声全息图