苏州博实机器人技术有限公司 第 1 页 共 6 页 Panasonic A5 系列伺服驱动器参数设定说明 一、需要设定的参数: 参数编号 Pr
参数名称 设定值 说明 0
01* 控制模式选择 0 位置控制模式 0
02 实时自动调整设置 1 基本 0
03 实时自动增益的机械刚性选择 16 0
04 惯量比 1000 0
07* 指令脉冲驶入方式 3 脉冲序列+符号 6
04 JOG 速度设定 100 注:编号带* 之参数,其设定值必须在控制电源断电重启之后才能修改成功
二、参数的修改 1、按设置键 S 进入 d**
uEP; 2、按模式键 M 进入参数Prr
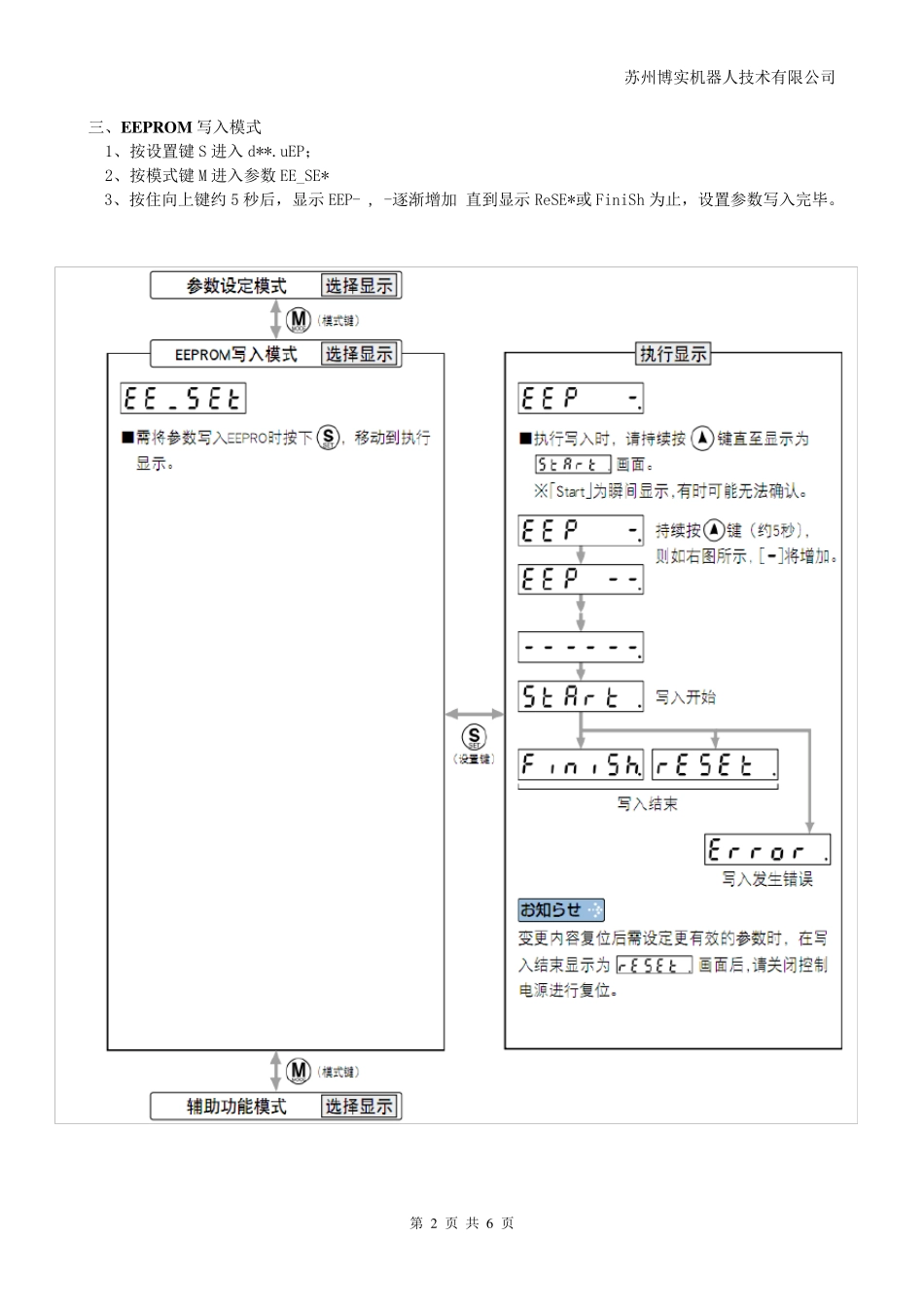
***,再按设置键 S 进入参数修改模式 苏州博实机器人技术有限公司 第 2 页 共 6 页 三、EEPROM 写入模式 1、按设置键 S 进入 d**
uEP; 2、按模式键 M 进入参数 EE_SE* 3、按住向上键约 5 秒后,显示 EEP- , -逐渐增加 直到显示 ReSE*或 FiniSh 为止,设置参数写入完毕
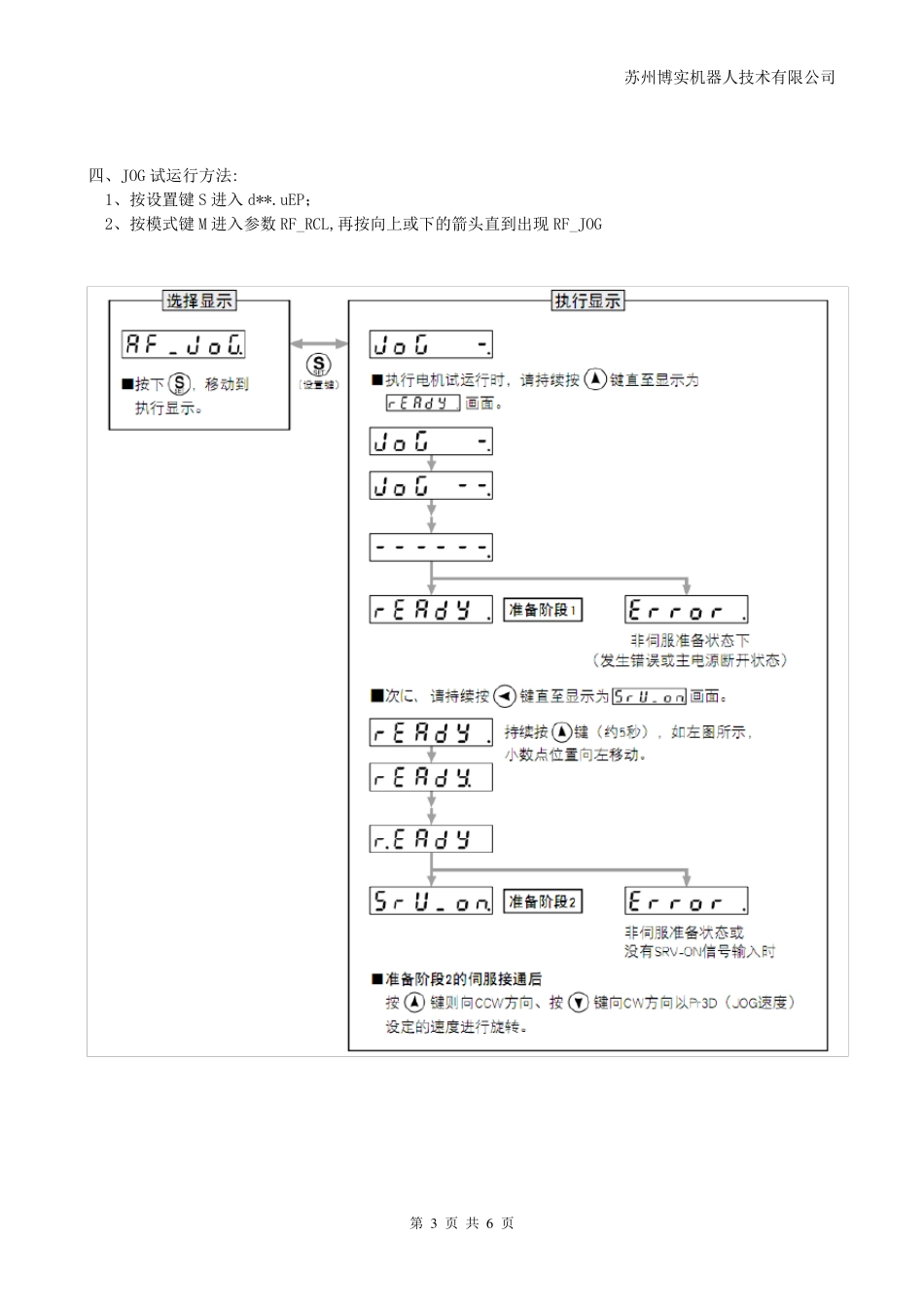
苏州博实机器人技术有限公司 第 3 页 共 6 页 四、JOG 试运行方法: 1、按设置键 S 进入 d**
uEP; 2、按模式键 M 进入参数 RF_RCL,再按向上或下的箭头直到出现 RF_JOG 苏州博实机器人技术有限公司 第 4 页 共 6 页 五、各模式结构 苏州博实机器人技术有限公司 第 5 页 共 6 页 苏州博实机器人技术有限公司 第 6 页 共 6 页 五、参数初始化