3多柔体系统动力学建模2
1柔性体上点的位置向量、速度和加速度1.柔性体系统中的坐标系图2
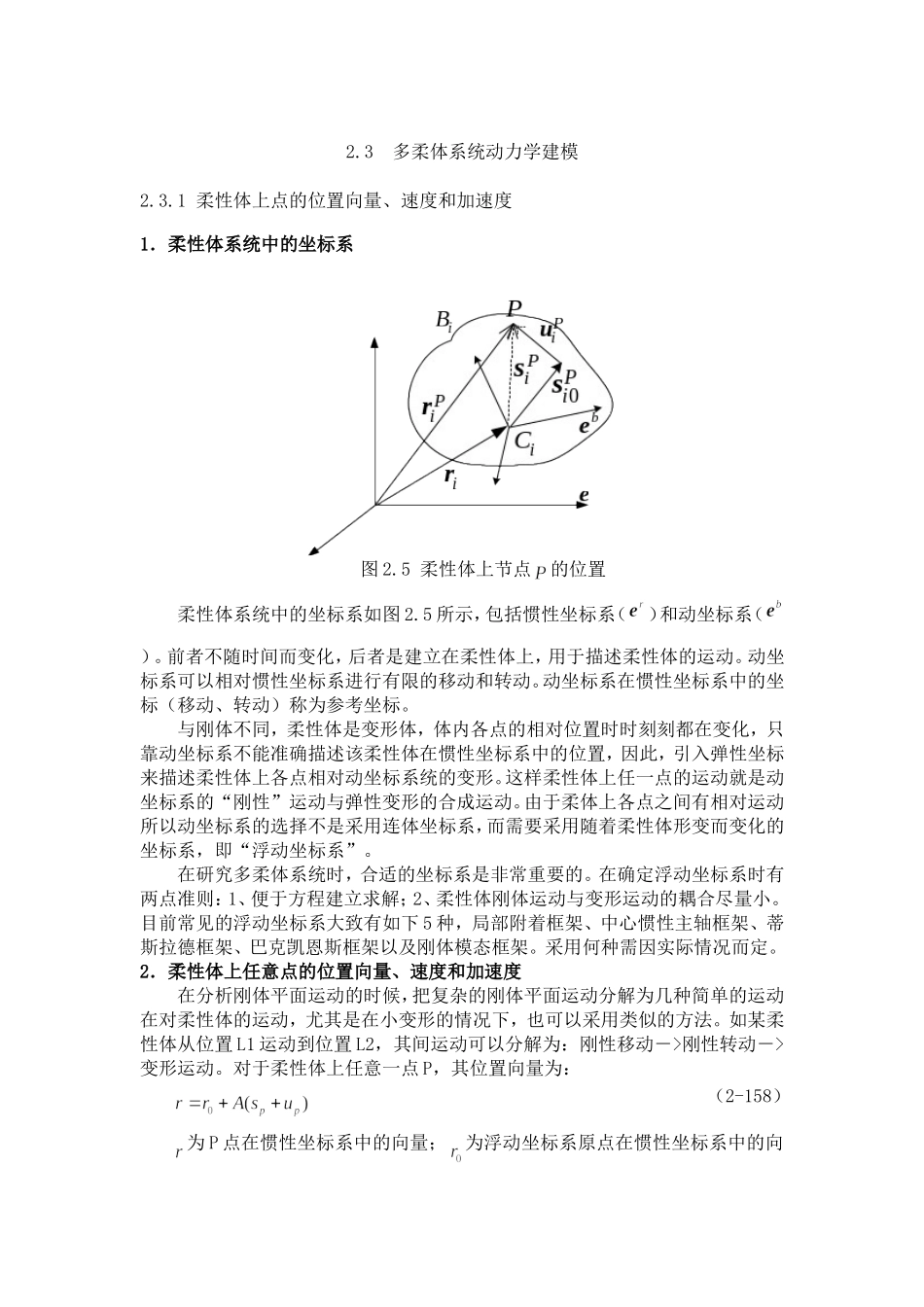
5柔性体上节点的位置柔性体系统中的坐标系如图2
5所示,包括惯性坐标系()和动坐标系()
前者不随时间而变化,后者是建立在柔性体上,用于描述柔性体的运动
动坐标系可以相对惯性坐标系进行有限的移动和转动
动坐标系在惯性坐标系中的坐标(移动、转动)称为参考坐标
与刚体不同,柔性体是变形体,体内各点的相对位置时时刻刻都在变化,只靠动坐标系不能准确描述该柔性体在惯性坐标系中的位置,因此,引入弹性坐标来描述柔性体上各点相对动坐标系统的变形
这样柔性体上任一点的运动就是动坐标系的“刚性”运动与弹性变形的合成运动
由于柔体上各点之间有相对运动所以动坐标系的选择不是采用连体坐标系,而需要采用随着柔性体形变而变化的坐标系,即“浮动坐标系”
在研究多柔体系统时,合适的坐标系是非常重要的
在确定浮动坐标系时有两点准则:1、便于方程建立求解;2、柔性体刚体运动与变形运动的耦合尽量小
目前常见的浮动坐标系大致有如下5种,局部附着框架、中心惯性主轴框架、蒂斯拉德框架、巴克凯恩斯框架以及刚体模态框架
采用何种需因实际情况而定
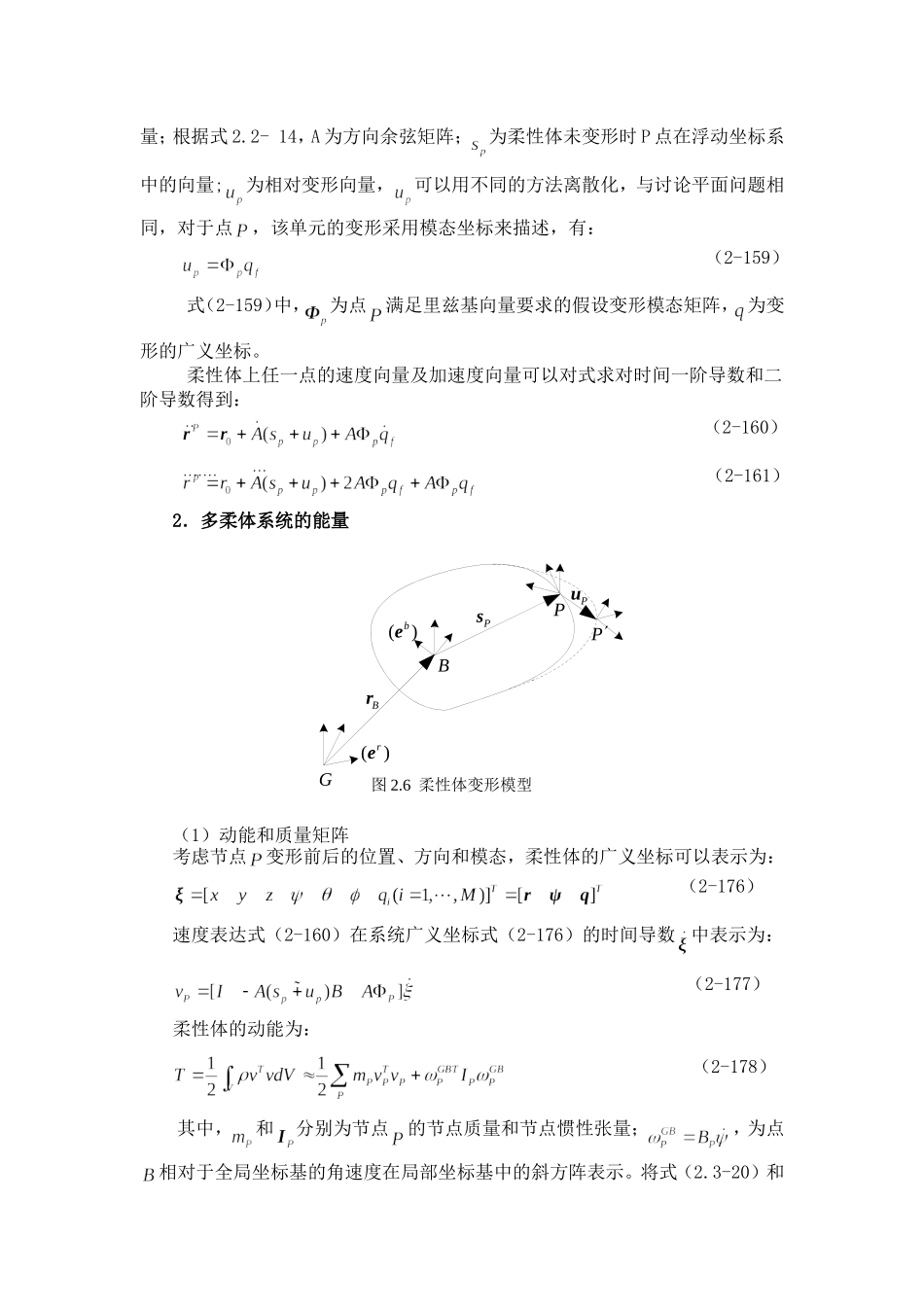
2.柔性体上任意点的位置向量、速度和加速度在分析刚体平面运动的时候,把复杂的刚体平面运动分解为几种简单的运动在对柔性体的运动,尤其是在小变形的情况下,也可以采用类似的方法
如某柔性体从位置L1运动到位置L2,其间运动可以分解为:刚性移动->刚性转动->变形运动
对于柔性体上任意一点P,其位置向量为:(2-158)为P点在惯性坐标系中的向量;为浮动坐标系原点在惯性坐标系中的向量;根据式2
2-14,A为方向余弦矩阵;为柔性体未变形时P点在浮动坐标系中的向量;为相对变形向量,可以用不同的方法离散化,与讨论平面问题相同,对于点,该单元的变形采用模态坐标来描述,有:(2-159)式(2-15