温度控制与 PID 算法温度控制与PID 算法 j 较为复杂, 下面结合实际浅显易懂的阐述一下PID 控制理论, 将温度控制及PID 算法作一个简单的描述
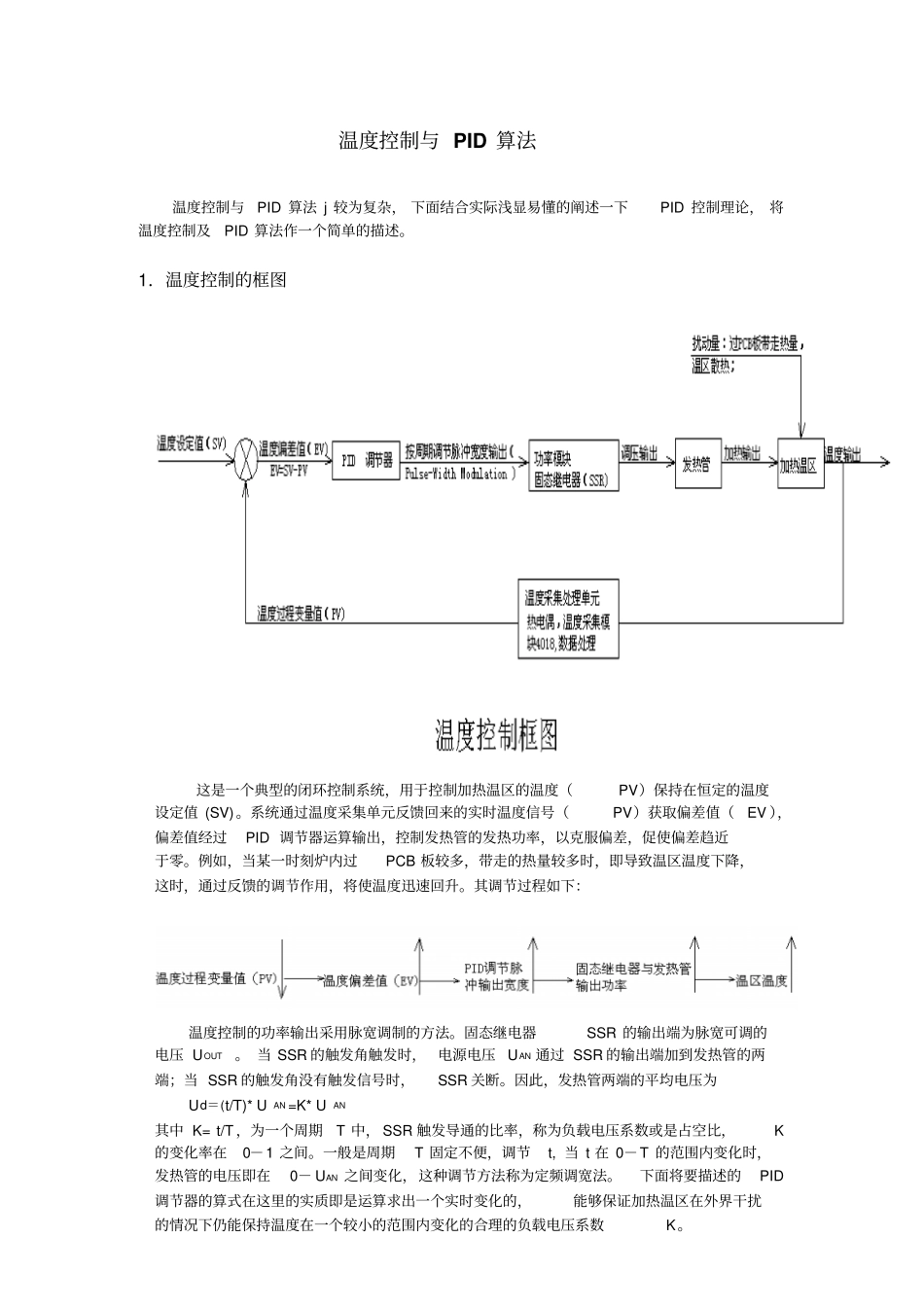
1.温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值 (SV)
系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV ),偏差值经过PID 调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零
例如,当某一时刻炉内过PCB 板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升
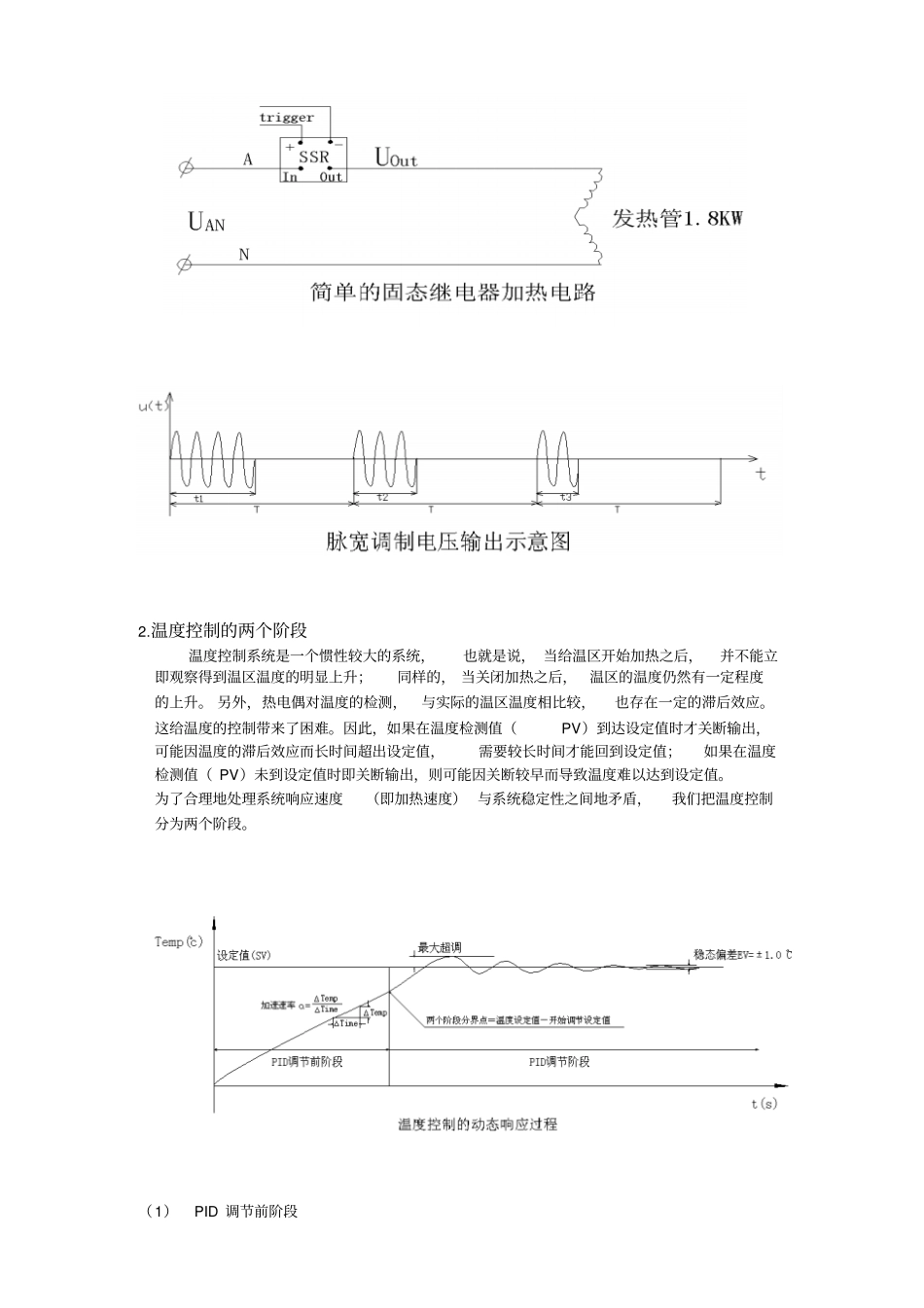
其调节过程如下:温度控制的功率输出采用脉宽调制的方法
固态继电器SSR 的输出端为脉宽可调的电压 UOUT
当 SSR 的触发角触发时, 电源电压 UAN 通过 SSR 的输出端加到发热管的两端;当 SSR 的触发角没有触发信号时,SSR 关断
因此,发热管两端的平均电压为Ud=(t/T)* U AN =K* UAN 其中 K= t/T ,为一个周期T 中, SSR 触发导通的比率,称为负载电压系数或是占空比,K的变化率在0-1 之间
一般是周期T 固定不便,调节t, 当 t 在 0-T 的范围内变化时,发热管的电压即在0- UAN 之间变化,这种调节方法称为定频调宽法
下面将要描述的PID调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K
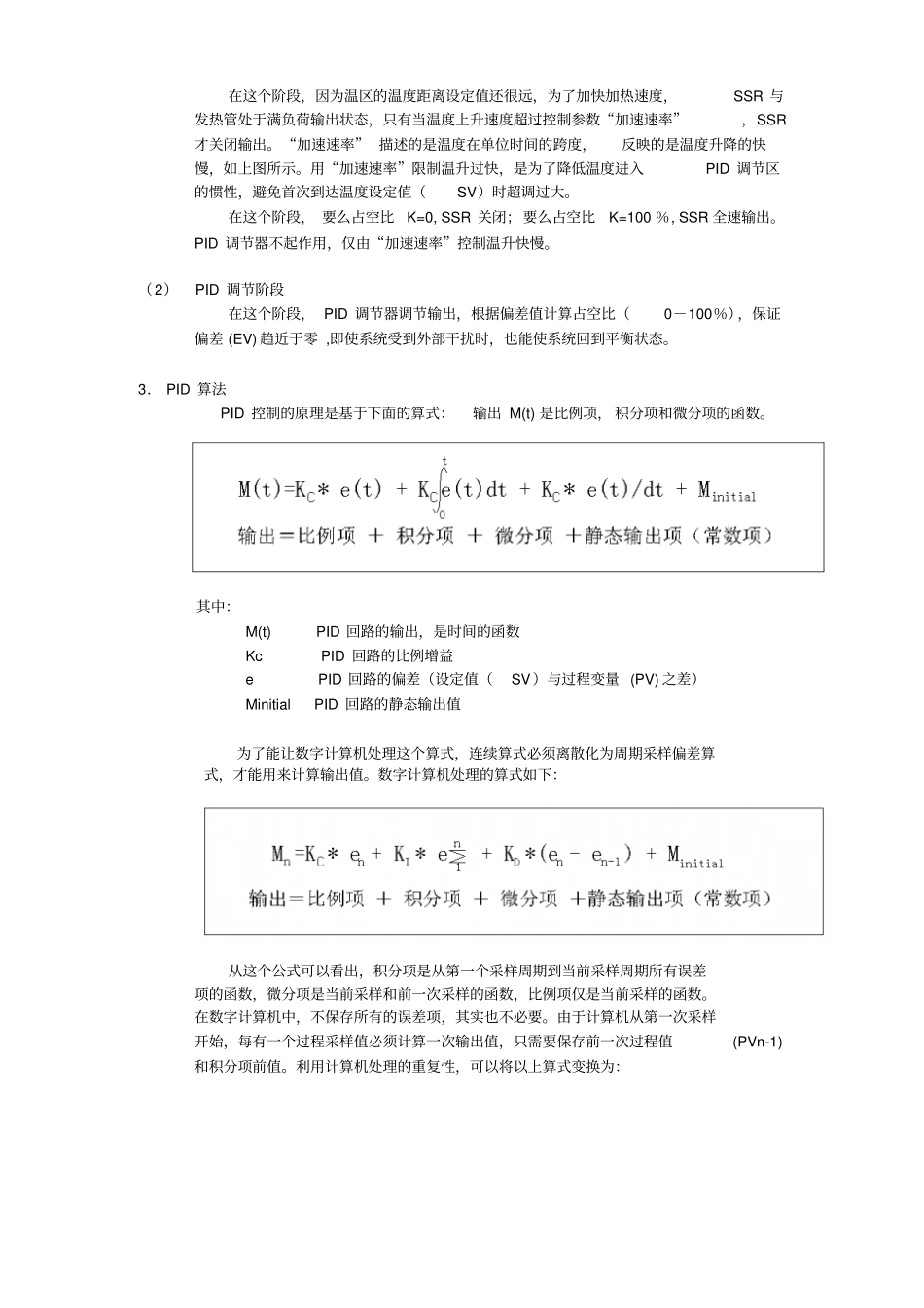
温度控制的两个阶段温度控制系统是一个惯性较大的系统,也就是说, 当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的, 当关闭加热之后,温区的温度仍然有一定程度的上升
另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应
这给温度的控制带来了困难
因此,如果在温度检测值(