1 第五节 振型向量正交性 对多自由度系统振动问题的分析与两自由度系统没有本质上的区别
只是由于自由度上的增多导致数学上计算变得复杂多了
因此,在研究多自由度系统振动问题时,应找出一种便于分析的方法,这就是模态分析法(振型叠加法)
为此,首先讨论有关耦合与解耦的方法
一、 耦合与解耦(教材 6
8) 举例说明什么是耦合与解耦
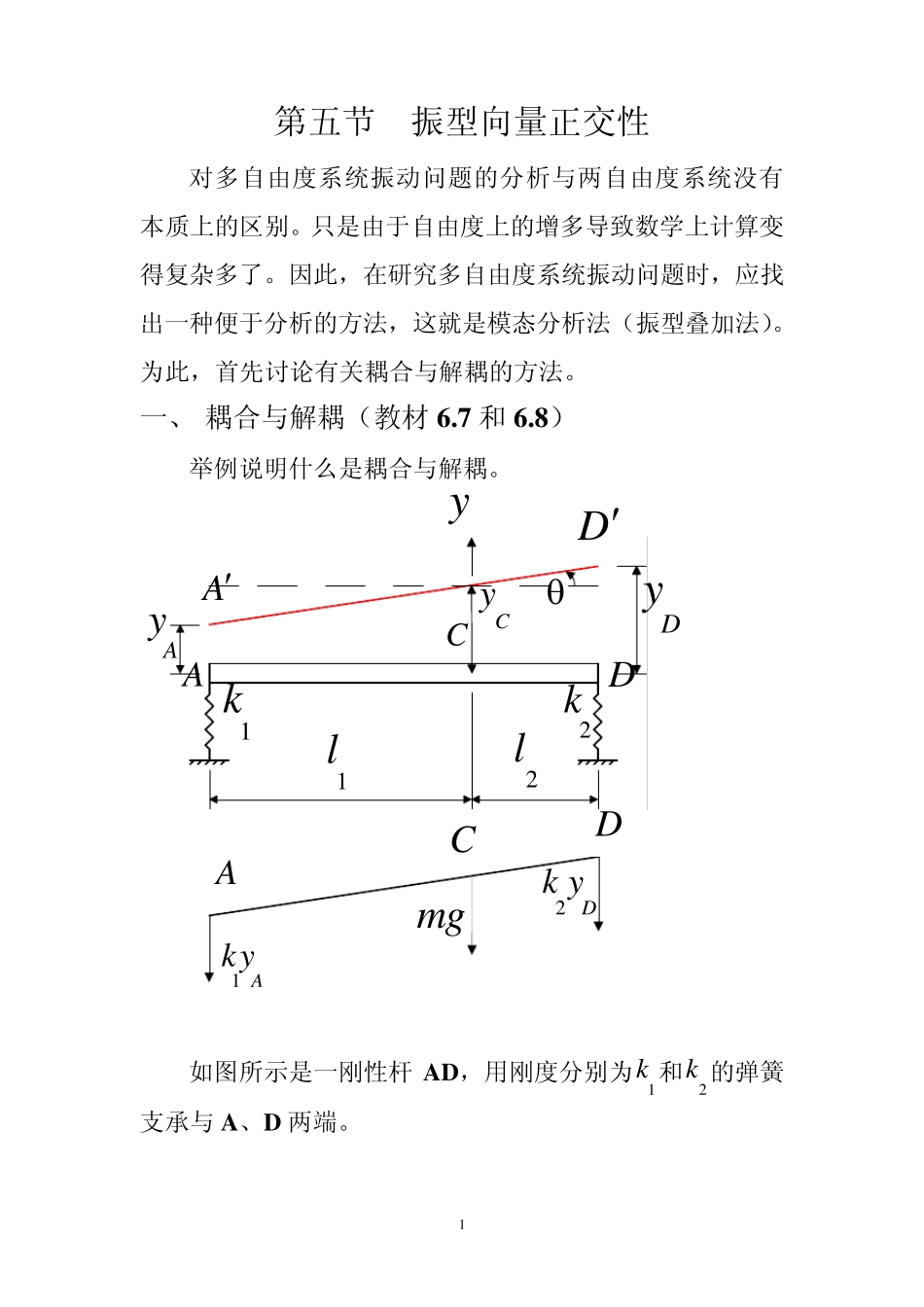
1l2l1k2k DDyCyAAyCy1AkyA2Dk ymgCDAD 如图所示是一刚性杆 A D ,用刚度分别为1k 和2k 的弹簧支承与A 、D 两端
2 (1) 取质心C 点的垂直位移Cy 和刚性杆绕C 点的转角 为广义坐标
则刚性杆在振动中任一瞬时的受力如图所示
由几何关系,得 12112212DACACDCDAl yl yyyylllyylyyll 由牛顿运动定律,的系统的振动微分方程为 121122CADADmyk yk yJk y lk y l (a) 式中 m 是刚性杆AD 的质量,J 是刚性杆AD 绕质心C 的转动惯量
整理式(a),得 122 21 1222 21 11 12 200CCCmykkyk lk lJk lk lyk lk l (b) 写成矩阵的形式 122 21 1222 21 11 12 20000CCykkk lk lymJk lk lk lk l (c) 在上式中,质量矩阵是一个对角矩阵,反映在方程组中,就是两个微分方程的第一个方程仅包含一个广义坐标的二阶导数(加速度)Cy ,第二个方程仅包含另一个广义坐标的二阶导数 ,这种加速度(惯性力)之间没有耦合的情况,称之为惯性解耦