1 PID 神 经 元 网 络 及 其 控 制 系 统 舒 怀 林 国 防 工 业 出 版 社 第一章:绪论 1
1 传统控制系统的局限性: 由于被控对象的复杂性、大规模和确定性、分布性,要实现自动控制,那么基于传统精确数学模型的控制理论就显现出极大的局限性
对于控制任务或者控制目标,以往都着眼于用数学语言进行描述,这种描述经常是不精确,实际上,控制任务和目标有多重性(多目标)和时变性,一个复杂任务的确定,需要多次反复,而且还包括任务所含信息的处理过程,也即任务集合处理
迄今为止,还不存在一种直接使用工程技术用语言描述系统和解决问题的方法
从工程技术语言到数学描述的影射过程中,一方面虽使问题作了很多简化,但另一方面却使用原问题丢失很多信息
传统的控制理论虽然也有办法对付控制对象的不确定性和复杂性,如自适应控制和鲁棒控制也可以克服系统中所包含的不确定性,达到优化控制的目的
但是自适应控制是以自动调节控制器的参数,使控制器与被控对象和环境达到良好的“匹配”,以削弱不确定性的影响为目标的
从本质上说,自适应和自校正控制都是通过对系统某些重要参数的估计,以补偿的方法;来克服系统参数在一定范围内的慢变化情况
鲁棒控制则是在一定的外部干扰和内部参数变化作用下,以提高系统的灵敏度为宗旨来抵御不确定性的
根据这一思想和原则所导出的算法,其鲁棒的区域是很有限的
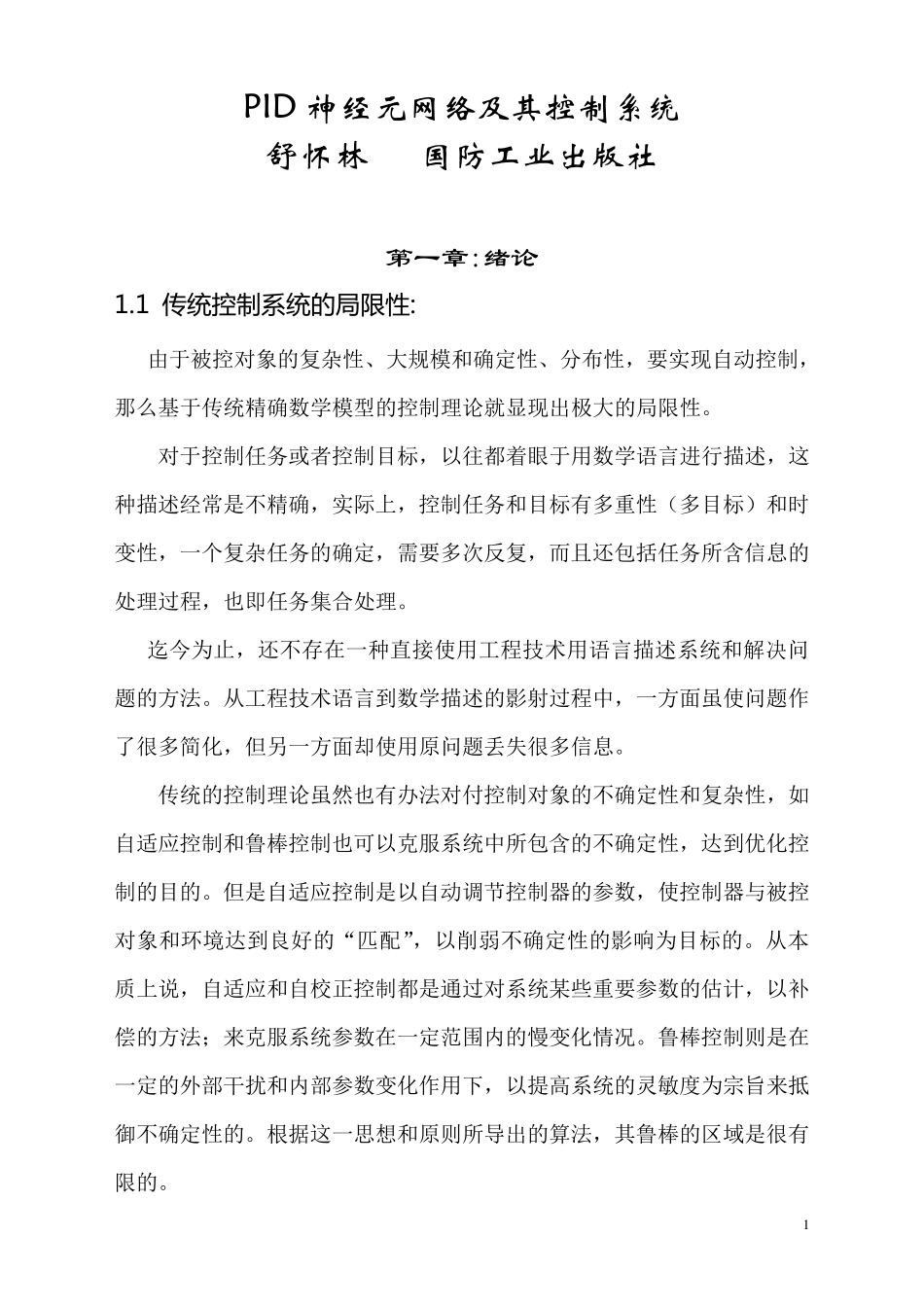
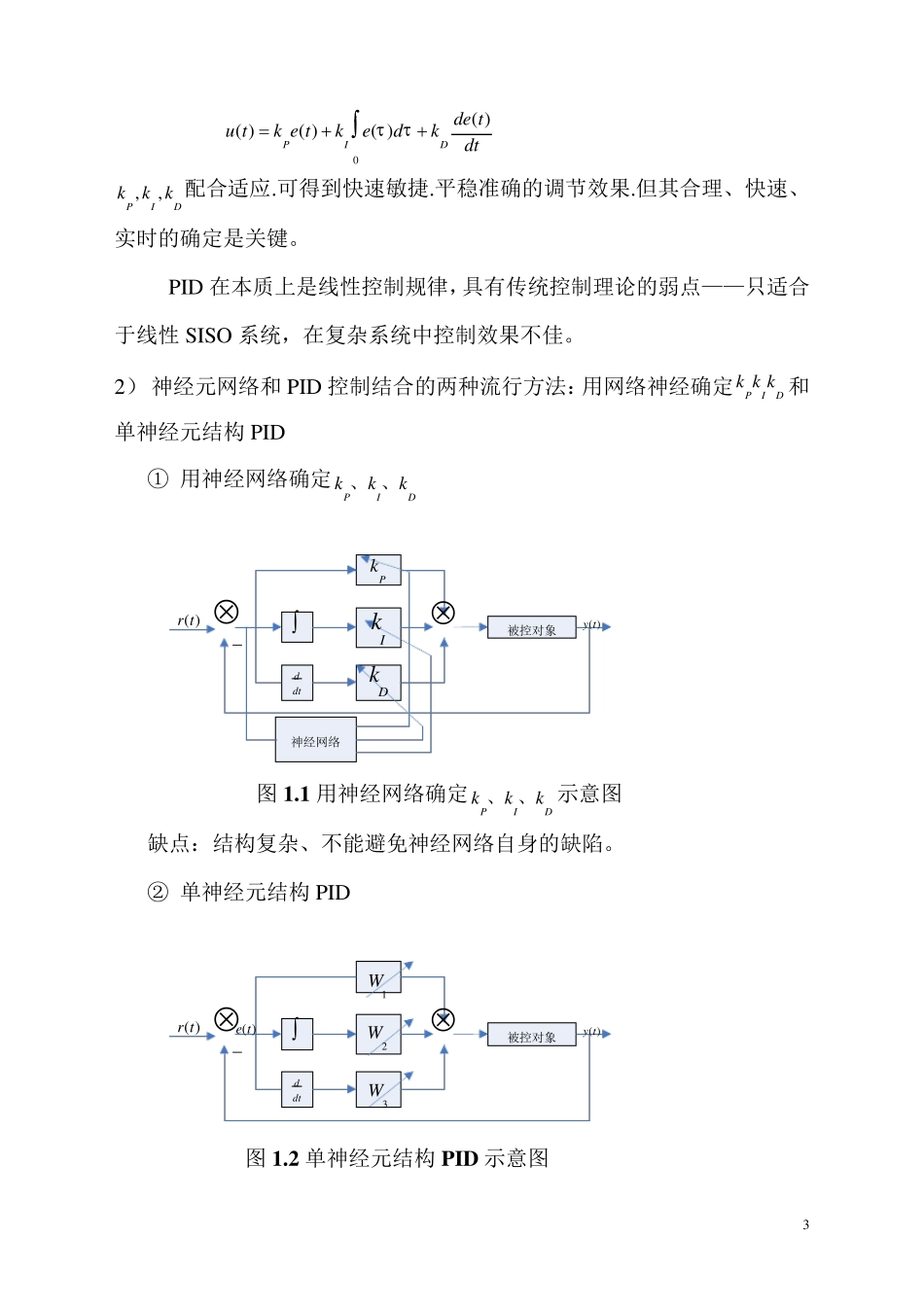
2 人工神经网络控制的系统的特点和弱点: 智能控制的概念和原理主要是针对被控对象、环境、控制目标或任务的复杂性而提出来的
神经元网络是智能控制的一个主要分支,神经网络是以大脑生理研究成果为基础,模拟大脑的某些生理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;在ANN 实际应用的同时,有关系统的稳定性、能控性、能观性等理论问题,有关 ANN 控制系统系统化设计方法问题,