当今的自动控制技术都是基于反馈的概念
反馈理论的要素包括三个部分: 测量、比较和执行
测量所得的变量,与期望值相比较,用这个误差纠正调节控制系统的响应
其中运用的最为广泛的便是PID 控制技术
PID 控制器由比例单元(P)、积分单元(I)和微分单元( D)组成
比例(P)调节作用(Proportional control action) 是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定
比例控制(P)是一种最简单的控制方式
其控制器的输出与输入误差信号成比例关系(输出和误差成正比)
根据设备有所不同,比例带一般为 2~10%(温度控制)
但是,仅仅是P 控制的话,会产生下面将提到的off set (稳态误差),所以一般加上积分控制(I),以消除稳态误差
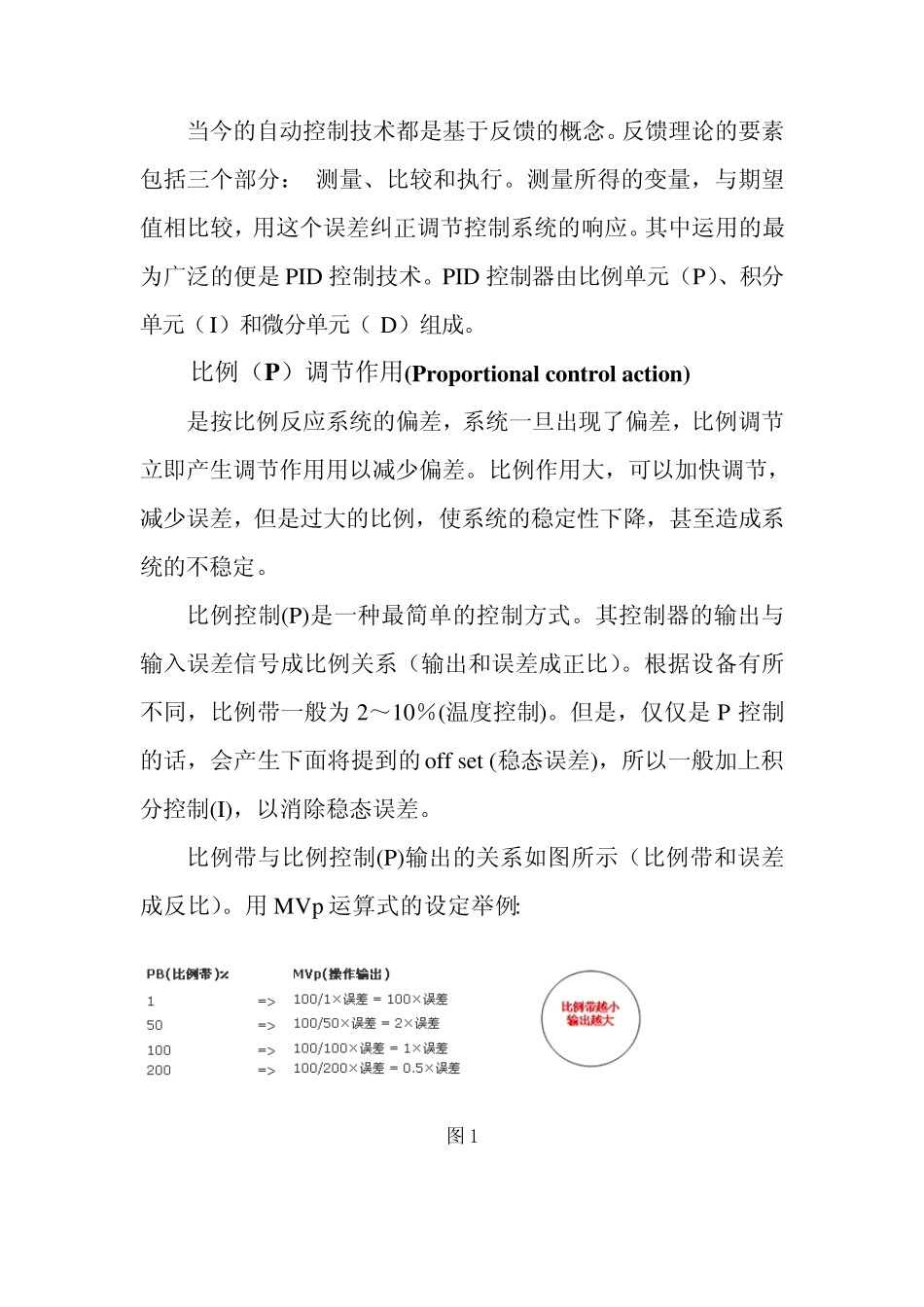
比例带与比例控制(P)输出的关系如图所示(比例带和误差成反比)
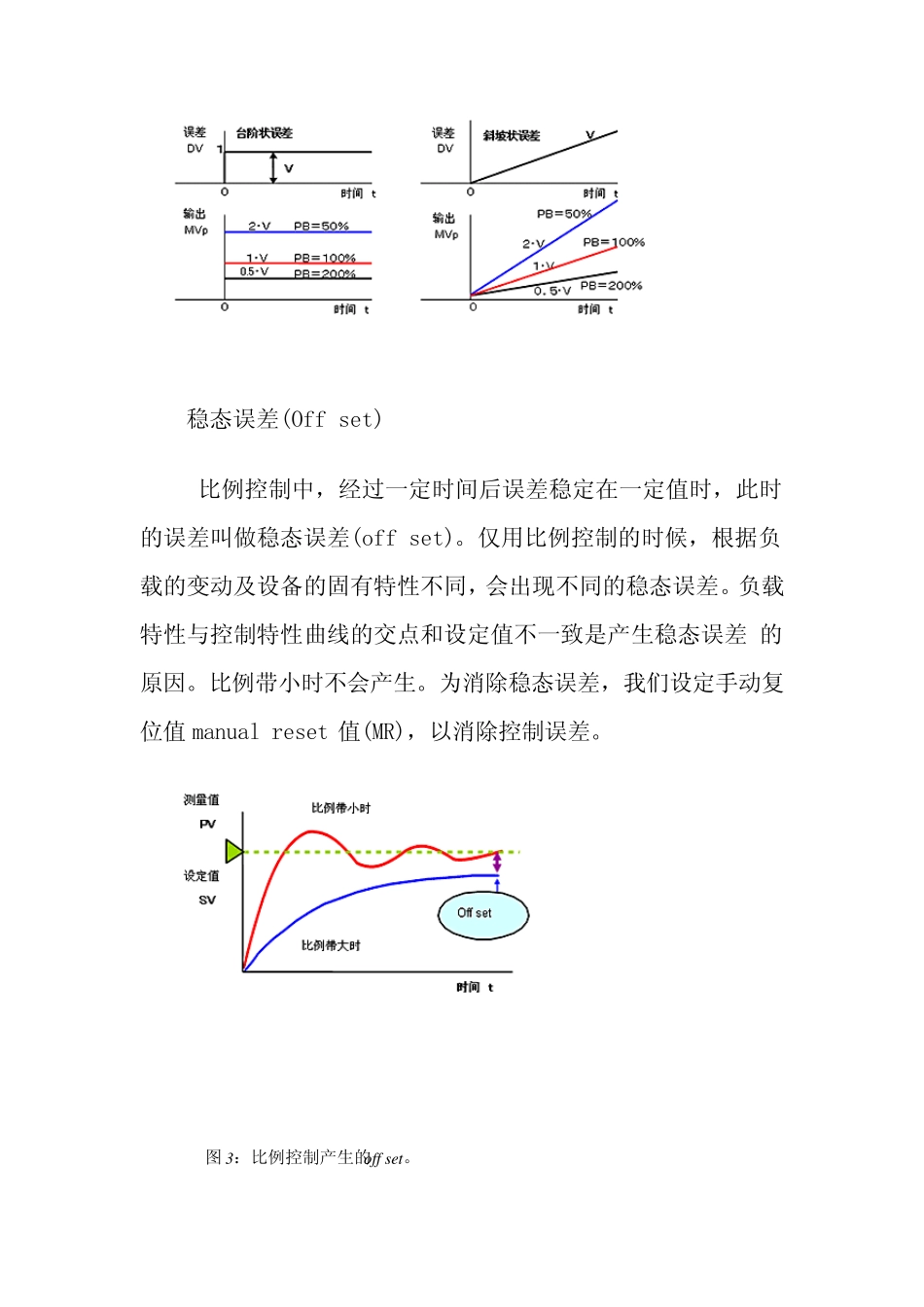
用 MVp 运算式的设定举例: 图 1 稳态误差(Off set) 比例控制中,经过一定时间后误差稳定在一定值时,此时的误差叫做稳态误差(off set)
仅用比例控制的时候,根据负载的变动及设备的固有特性不同,会出现不同的稳态误差
负载特性与控制特性曲线的交点和设定值不一致是产生稳态误差 的原因
比例带小时不会产生
为消除稳态误差,我们设定手动复位值manual reset 值(MR),以消除控制误差
图 3:比例控制产生的off set
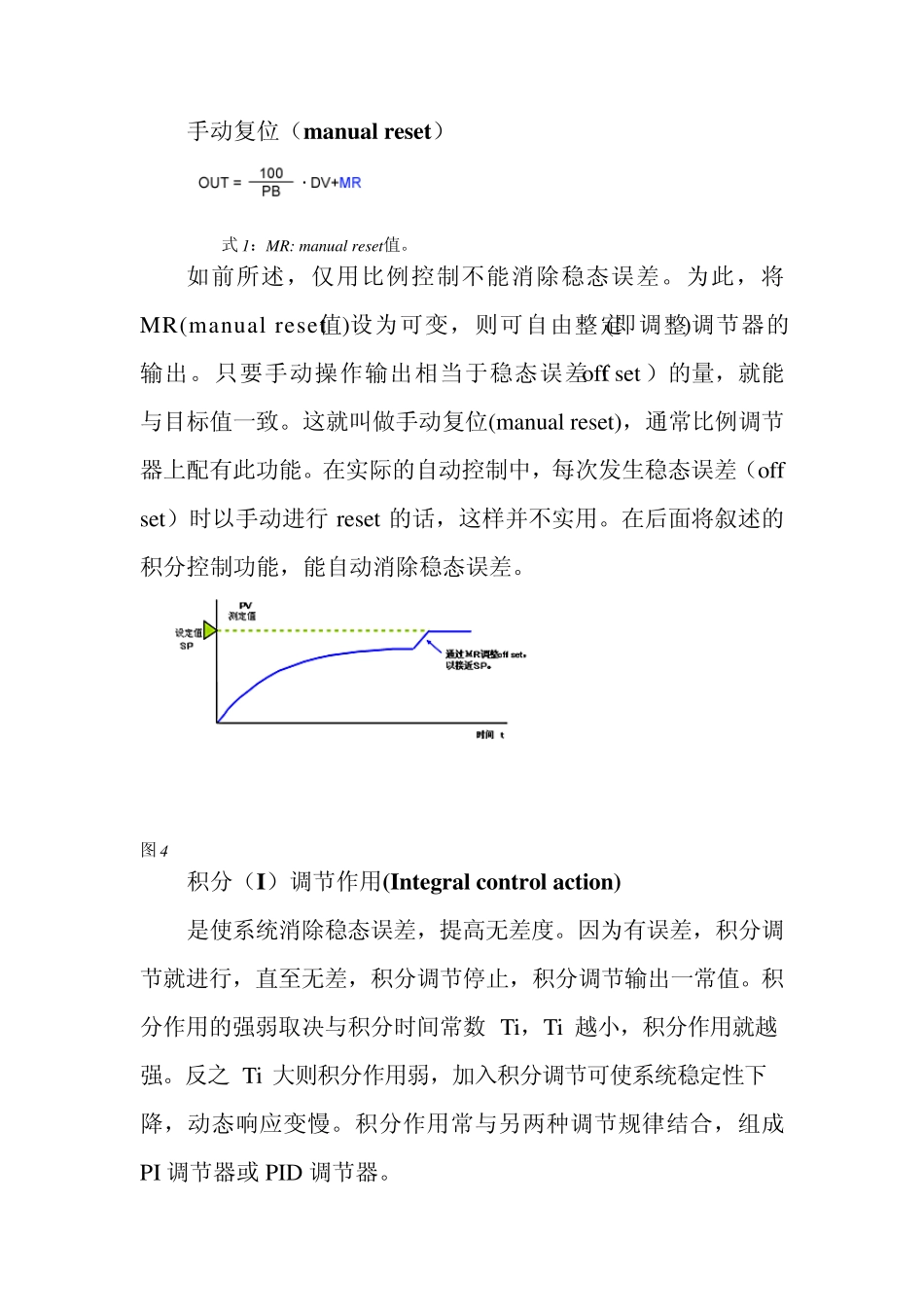
手动复位(manu al reset) 式1:MR: manu al reset值
如前所述,仅用比例控制不能消除稳态误差
为此,将MR(manu al reset值)设为可变,则可自由整定(即调整)调节器的输出
只要手动操作输出相当于稳态误差(off set )的量,就能与目标值一致