第 三 章 PID神 经 网 络 结 构 及 控 制 器 的 设 计 在 控 制 系 统 中 , PID控 制 是 历 史 最 悠 久 , 生 命 力 最 强 的 控 制 方 式 , 具 有 直 观 、实 现 简 单 和 鲁 棒 性 能 好 等 一 系 列 优 点
但 近 年 来 随 着 计 算 机 的 广 泛 应 用 , 智 能 控制 被 越 来 越 广 泛 的 应 用 到 各 种 控 制 系 统 中
智 能 控 制 方 法 以 神 经 元 网 络 为 代 表 ,由 于 神 经 网 络 可 实 现 以 任 意 精 度 逼 近 任 意 函 数 , 并 具 有 自 学 习 功 能 , 因 此 适 用 于时 变 、 非 线 性 等 特 性 未 知 的 对 象 , 容 易 弥 补 常 规 PID控 制 的 不 足
将 常 规 PID控 制同 神 经 网 络 相 结 合 是 现 代 控 制 理 论 的 一 个 发 展 趋 势
1 常 规 PID控 制 算 法 和 理 论 基 础 3
1 模 拟 PID控 制 系 统 PID(Proportional、 Integral and Differential)控 制 是 最 早发 展 起来 的 控制 策略之一 , 它以 算 法 简 单 、 鲁 捧性 好 、 可 靠性 高等 优 点 而梭广 泛 应 用 于 工业过程控 制 中
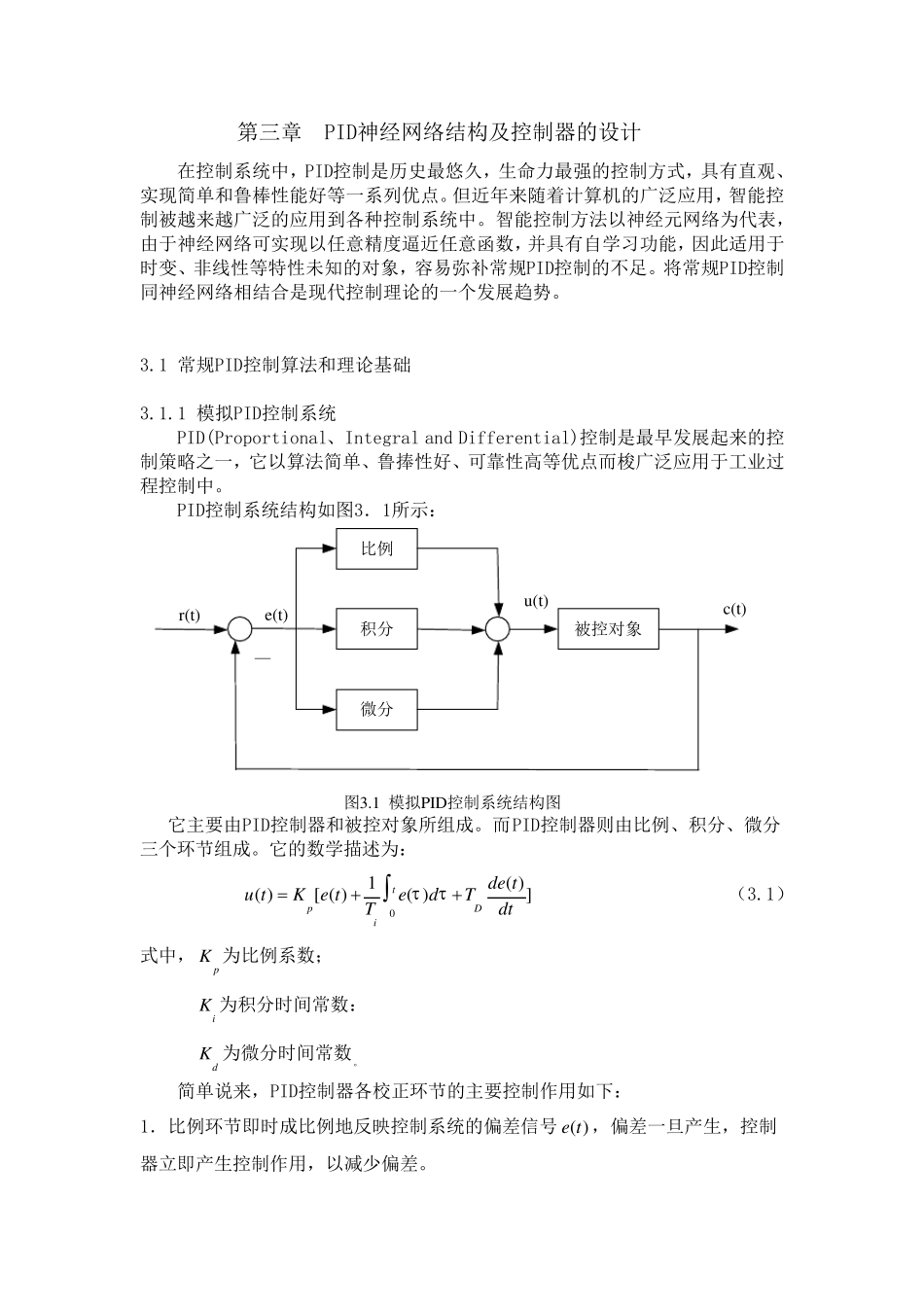
PID控 制 系 统 结 构 如图3.1所示:积分比例微分被 控 对 象—e(t) u (t) c(t) r(t) 图3
1 模 拟 PID控 制 系 统 结 构 图 它主要由 PID控 制 器 和 被 控 对 象 所组成
而PID控 制 器 则由 比例、 积分、 微分三 个 环 节 组成
它的 数 学 描 述 为 : 01( )( )[ ( )( )]tpDide tu tKe ted