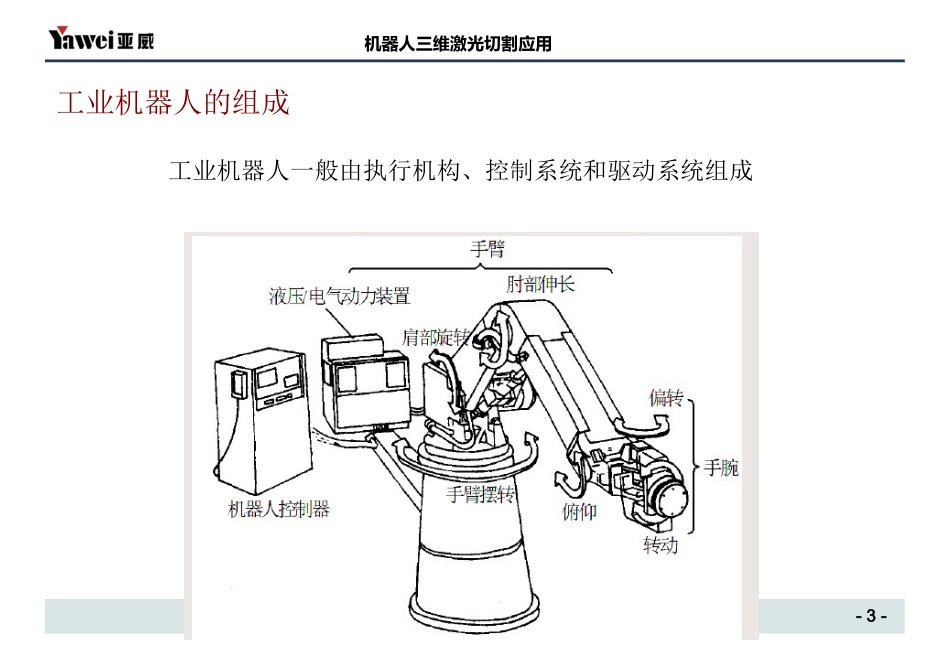
内部文件机器人三维激光切割应用2024年10月19日星期六数控技术部陈明-2-机器人三维激光切割应用目录:一.控制系统软硬件介绍二.常用技术方案介绍三.典型工装介绍四.运动控制优化讨论-3-机器人三维激光切割应用工业机器人的组成工业机器人一般由执行机构、控制系统和驱动系统组成-4-机器人三维激光切割应用工业机器人按坐标系分类直角坐标机器人,优点:位置精度高,控制无耦合,简单可靠;缺点:结构庞大,动作范围小,灵活性差-5-机器人三维激光切割应用工业机器人按坐标系分类圆柱坐标机器人,优点:通用性强,结构紧凑;缺点:结构庞大,动作范围小,灵活性差-6-机器人三维激光切割应用工业机器人按坐标系分类球坐标机器人,优点:结构紧凑,位置精度尚可,工作范围大,占地面积小;缺点:控制系统复杂-7-机器人三维激光切割应用工业机器人按坐标系分类关节坐标机器人,优点:工作范围大,动作灵活;缺点:位置精度低,控制有复杂的耦合问题-8-机器人三维激光切割应用机器人三维光纤激光切割机器人三维激光切割是利用工业机器人灵活和快速的动作性能,根据切割加工工件尺寸的大小不同,可以选择将机器人正装或者倒装对不同产品、不同轨迹进行示教编程或离线编程,机器人的第六轴装载光纤激光切割头对不规则工件进行三维切割;光纤激光切割头上配备随动装置和光路传输装置,利用光纤将激光传输到切割头上,再利用聚焦系统进行聚焦,针对不同材料厚度的板材开发出不同工艺参数对三维金属板材进行多方位切割,满足生产需求
-9-机器人三维激光切割应用机器人管件切割系统配置序号子系统厂商备注1光纤激光器德国IPG2冷水机河北同飞3机器人法国Staubli日本FANUC4激光切割头德国PRECITEC5旋转式交换台德国WEISS往复式交换台6激光防护房7除尘过滤系统美国唐纳森8随动控制盒9离线软件美国MASTERCAM10控制系统软件-10-机器人三维激光