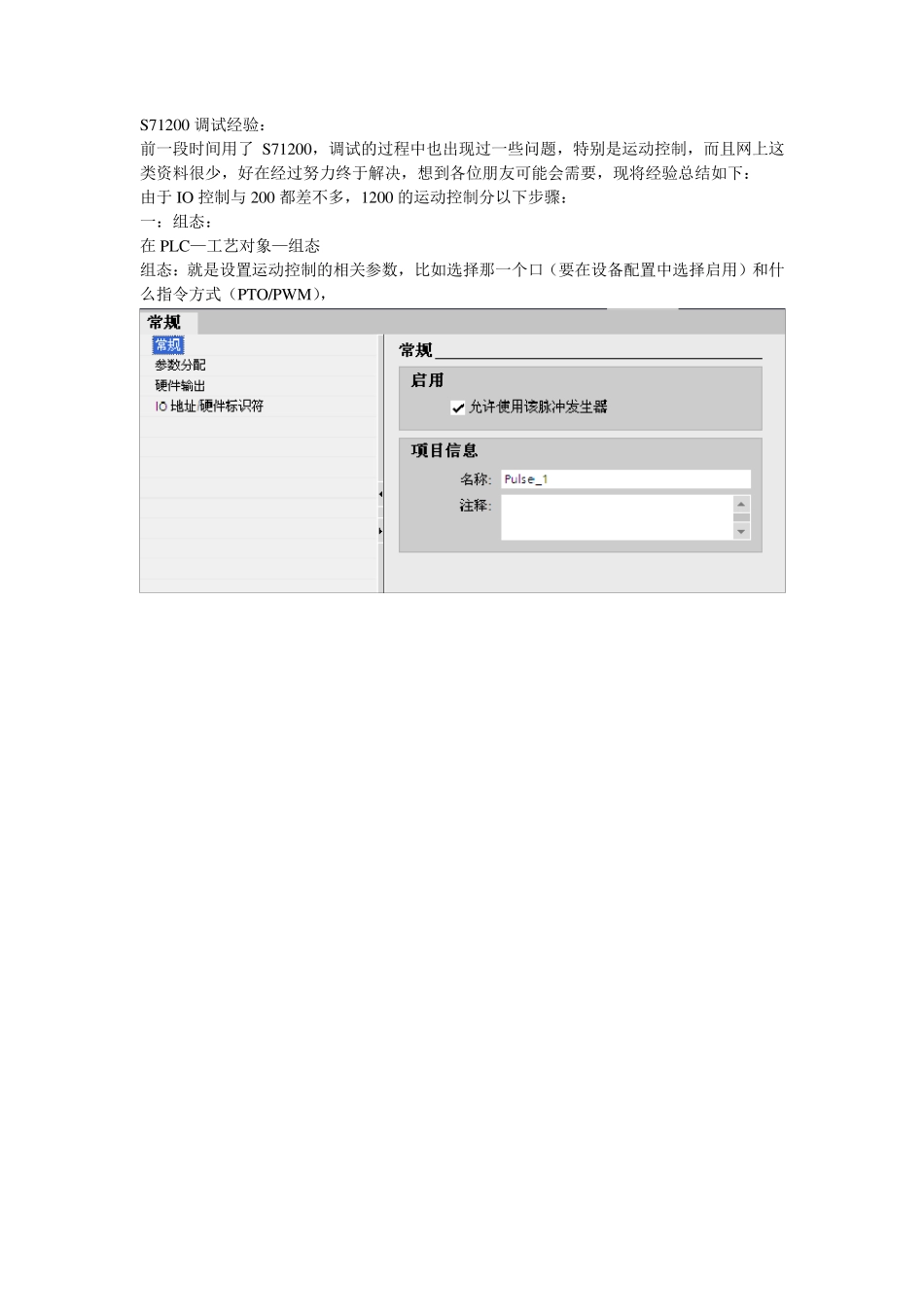
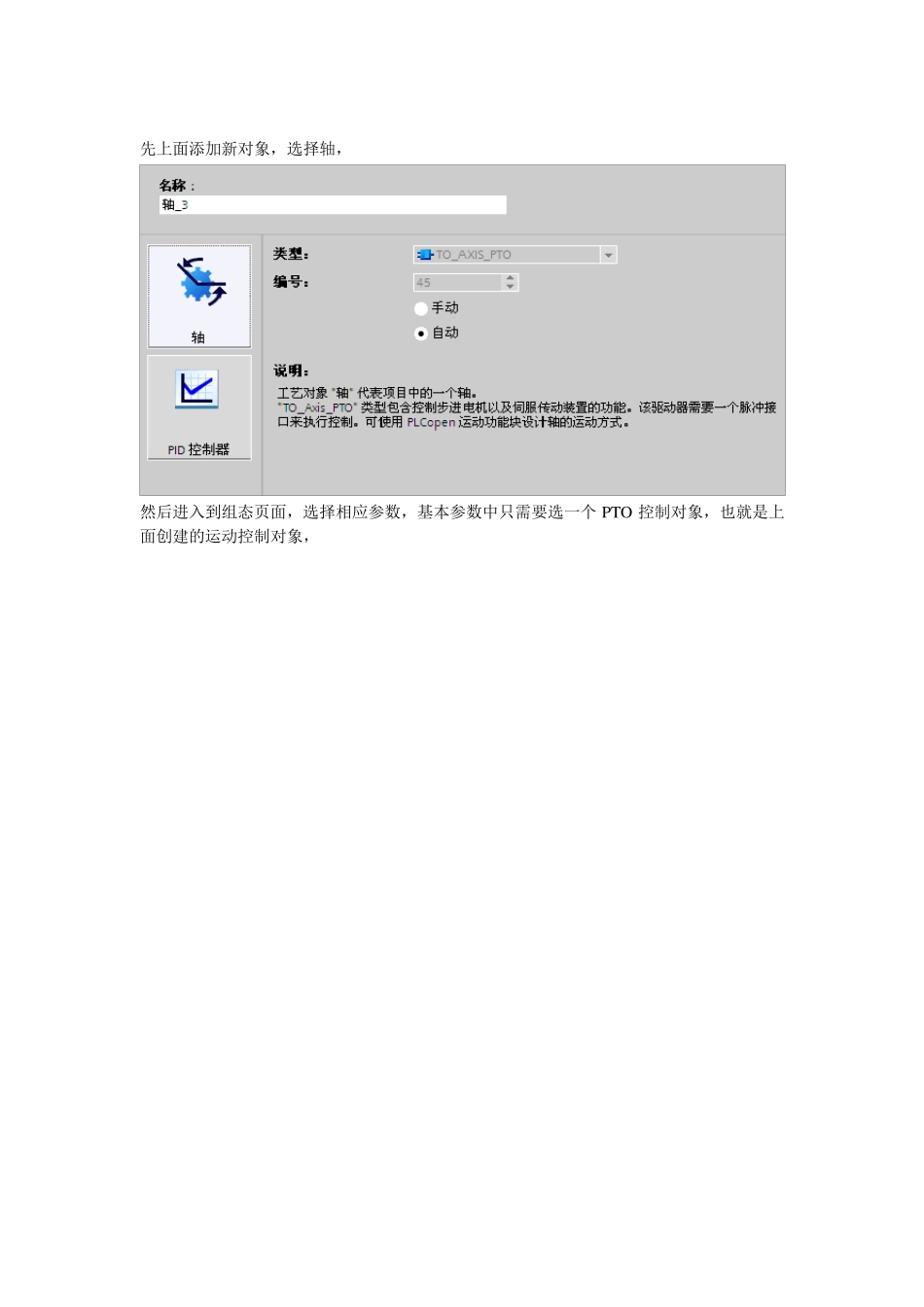
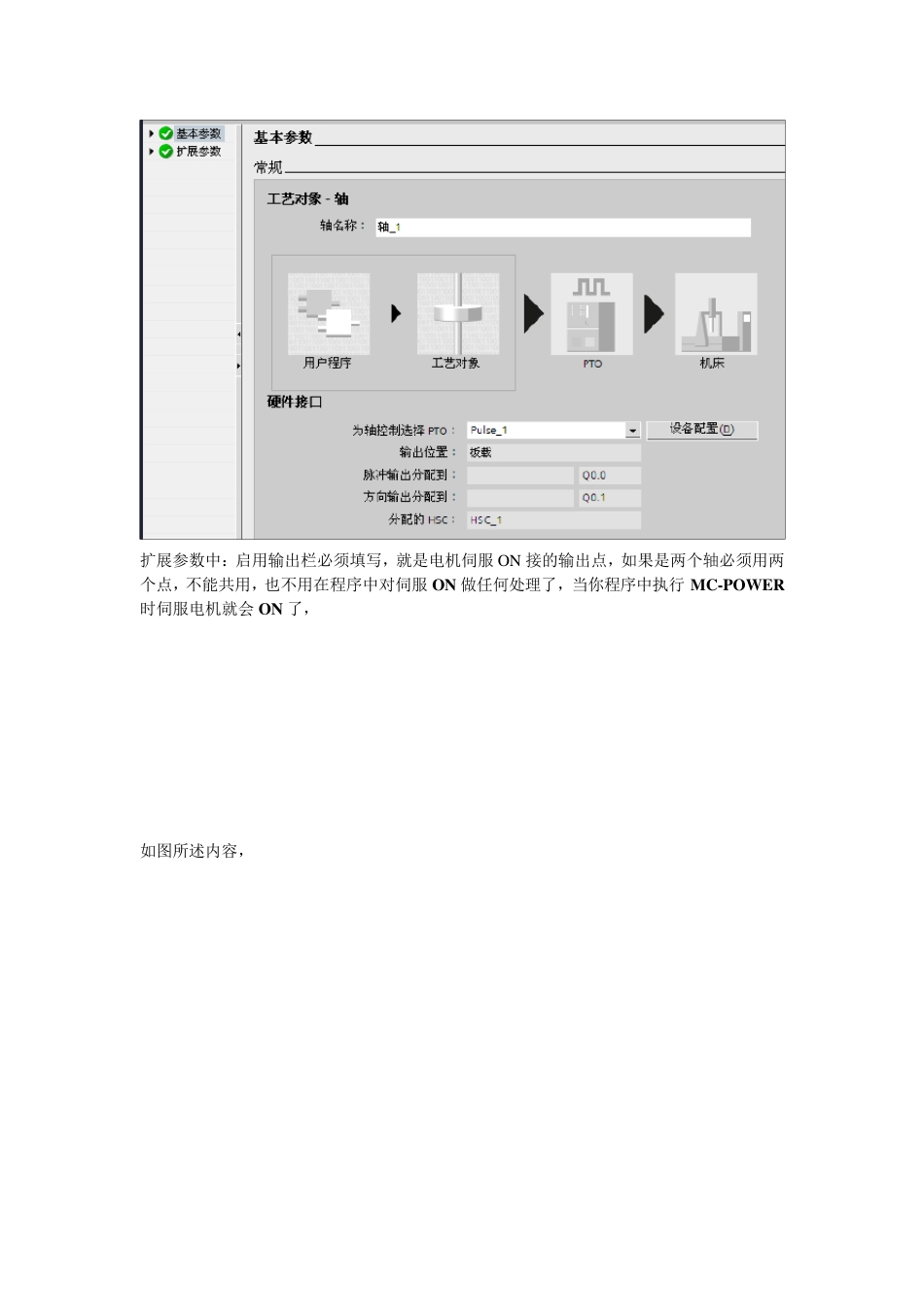
S71200 调试经验: 前一段时间用了S71200,调试的过程中也出现过一些问题,特别是运动控制,而且网上这类资料很少,好在经过努力终于解决,想到各位朋友可能会需要,现将经验总结如下: 由于IO 控制与200 都差不多,1200 的运动控制分以下步骤: 一:组态: 在PLC—工艺对象—组态 组态:就是设置运动控制的相关参数,比如选择那一个口(要在设备配置中选择启用)和什么指令方式(PTO/PW M), 先上面添加新对象,选择轴, 然后进入到组态页面,选择相应参数,基本参数中只需要选一个 PTO 控制对象,也就是上面创建的运动控制对象, 扩展参数中:启用输出栏必须填写,就是电机伺服O N 接的输出点,如果是两个轴必须用两个点,不能共用,也不用在程序中对伺服ON 做任何处理了,当你程序中执行 MC-POW ER时伺服电机就会 ON 了, 如图所述内容, 限位的选择是要注意高电平和低电平,如果设错了会导致伺服不能动;动态就是加减速和最高速度不用我多说了吧, 回原点,主要是选择原点信号输入点,逼近方向及参考点开关,逼近方向很好理解,参考点开关,原则上是在减速运动的前方,这个是试出来的,我也说不太明白, 以上设置后,组态完成了,接下来要在程序中编写控控制程序了, 这个必须写,不然电机不能得电, RESET 也很有用,在电机撞到限位了,要先按一下复位才能向反方向运动,与其它的不一样,要注意 回原点,走绝对位置是必须要先回一下原点的,走相对位置是不用回原点,回原点方式,用四种,3 和 4 用组态里的方式回原点,都可以,我只用过 3 ,4 没用过, 用来显示轴当前位置