1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。解:自动控制系统:能够实现自动控制任务的系统,由控制...
自动控制原理胡寿松第四版课后

第三章 线性系统的时域分析与校正习题及答案 3-1 已知系统脉冲响应t25.1e0125.0)t(k,试求系统闭环传递函数)s(。 解 )25.1s...
自动控制原理胡寿松第二章课后答案

第四章 线性系统的根轨迹法习题及参考答案 自动控制原理 胡寿松 第二版 课后答案 4-1 解:系统的开环传递函数为 根轨迹如图所示 4...

1 第六章 线性系统的校正方法习题及参考答案 自动控制原理 胡寿松 第二版 课后答案 2 6-5 解: 系统校正后的开环传递函数为: 3...
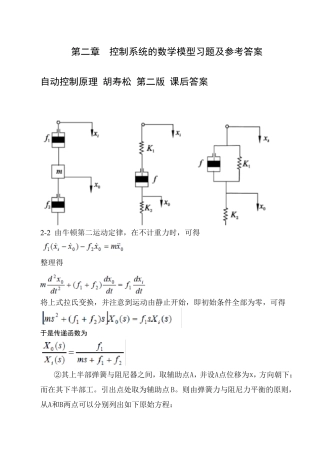
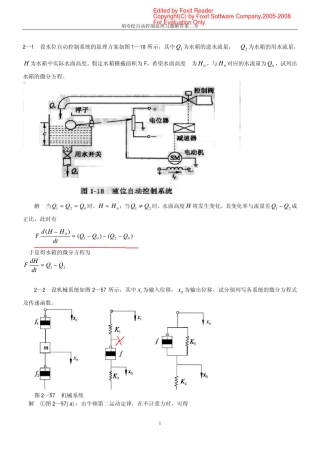
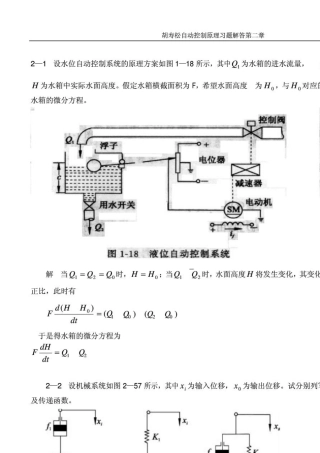
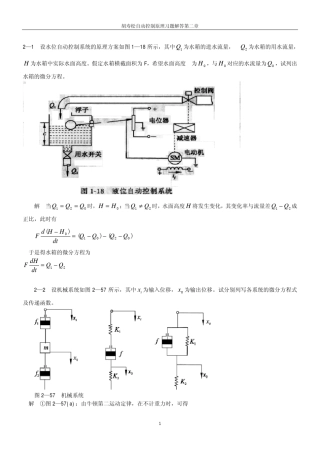
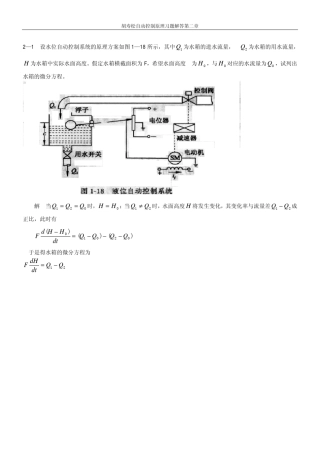
第二章 控制系统的数学模型习题及参考答案 自动控制原理 胡寿松 第二版 课后答案 2 -2 由牛顿第二运动定律,在不计重力时,可得 ...
自动控制原理胡寿松习题答案

自动控制原理胡寿松第5版第七章答案
自动控制原理胡寿松主编课后习题答案详解胡寿松第六版自控答案
自动控制原理第六版答案胡寿松1
《自动控制原理教案》 教材:自动控制原理,科学出版社,主编:胡寿松 主讲:李界家 1 《自动控制原理》课程教案 前 言 一、 重要...
![自动控制原理_第五版_胡寿松_课后答案[18章].khdaw](https://file.xiaomilidoc.com/convert/202504/05/12406635/thumb-P1-10419271-0730-4a10-aa98-9b1baca35f2c-320x453.webp)
自动控制原理_第五版_胡寿松_课后答案[18章].khdaw
自动控制原理(胡寿松著)科学出版社课后答案
自动控制原理(胡寿松)课后习题答案详解

自 动 控 制 原 理 课 后 答 案 1 请 解 释 下 列 名 字 术 语 : 自 动 控 制 系 统 、 受 控 对 象 、...

1 请 解 释 下 列 名 字 术 语 : 自 动 控 制 系 统 、 受 控 对 象 、 扰 动 、 给 定 值 、 参 考 输...

(完整 word 版)最优控制理论与系统胡寿松版部分习题答案2-5 求通过 x(0) 1, x(1) 2 ,使下列性能泛函为极值的极值曲线 x*(t)...

精品文档。1欢迎下载2-5 求通过(0)1x,(1)2x,使下列性能泛函为极值的极值曲线* ( )x t :02(1)fttJx dt&解:由题可知,始端和终端均...

自 动 控 制 原 理 _胡 寿 松 _第 二 版 _答 案 全 解 1 / 34 第 二 章 控 制 系 统 的 数 学 模 型 习 ...