机器学习作业参考答案

1 2 .5 (题目略) (a). 第一步:S0 {<(Q Q Q Q ), (Q Q Q Q)>} G0 {<(? ? ? ?), (? ? ? ?)>} 第二步:S1 {<(mal...
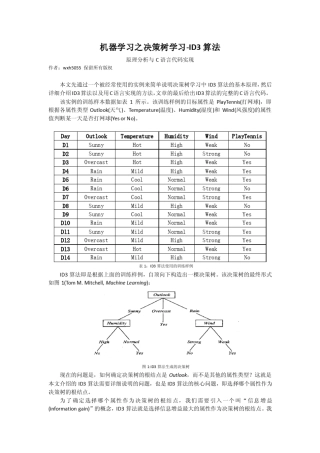
机器学习之决策树学习ID3算法原理分析与C语言代码实现
机 器 学 习 之用 Python从零实现贝叶斯分类器 关于朴素贝叶斯 朴素贝叶斯算法是一个直观的方法,使用每个属性归属于某个类的概率来...
机器学习中的相似性度量 在做分类时常常需要估算不同样本之间的相似性度量(Similarity Measurement),这时通常采用的方法就是计算样本间...

SVM 1.判断题 (1) 在SVM训练好后,我们可以抛弃非支持向量的样本点,仍然可以对新样本进行分类。(T) (2) SVM对噪声(如来自其他分布的...

1 、C4.5 机器学习中,决策树是一个预测模型;他代表的是对象属性与对象值之间的一种映射关系。树中每个节点表示某个对象,而每个分叉路...
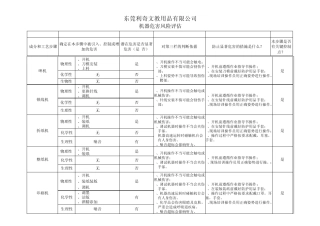
东莞利奇文教用品有限公司 机器危害风险评估 1 2 3 4 5 6 成分和工艺步骤 确定在本步骤中被引入、控制或增加的危害 潜在危害是否...
一,为什么要Mastering(零点复归) 零点复归机器人时需要将机器人的机械信息与位置信息同 步,来定义机器人的物理位置。必须正确操作机...
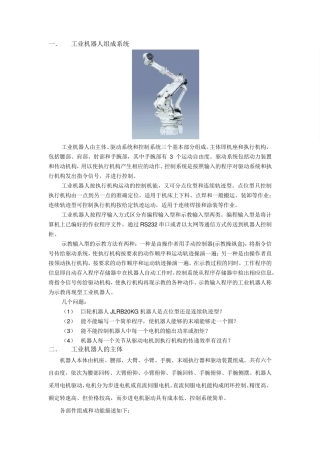
一. 工业机器人组成系统 工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括腰部、肩部、肘部和手腕部...

机器人 一 、 机 器 人 的 分 类 机 器 人 ( robot) 是 一 台 设 计 用 于 快 速 准 确 、 重 复 执 行 ...
一 目前机器人的主要驱动方式及其特点 根据能量转换方式,将驱动器划分为液压驱动、气压驱动、电气驱动和新型驱动装置。在选择机器人驱动...
机 器 人 用 传 感 器 外 部 传 感 器 1. 概 述 为 了 检 测 作 业 对 象 及 环 境 或 机 器 人 与 它 ...

- 1 - PUMA 机器人大作业 1 坐标系建立: 坐标系可以简化为: - 2 - 2 D-H 参数表: PUMA 机器人的杆件参数: 1d0.6604m...

第四章 机器人的位置分析 4 .1 机器人的位置正解方程 4.1.1 引言 在这一章中,我们将研究表示各种不同坐标架的齐次变换,并阐述将各...
机器人与人类的关系 作者: SANJY SAN (SANJY SAN) 依照圣经说法,上帝造人的目的是「荣耀」祂自己(人类现在想要做人造人,是不是:也...
1 / 6 机器(设备)购销(安装)合同 买方(甲方): 编号: 卖方(乙方): 年 月 日签订于甲方住所地 根据《中华人民共和国合同...

效时BGA 返修台操作详细 ★基本知识 1 目前smt 常用的锡有两种即有铅和无铅成份为:铅Pb 锡 SN 银AG 铜CU。有铅锡珠Sn63Pb37 融...
改变世界的机器读后感 班级:工业 C 091 姓名:*** 学号:****** 《 改 变 世 界 的 机 器 》 读 后 感 40 年 前 ,...
精品文档---下载后可任意编辑焊接机器人的应用焊接机器人技术的开展我国开发工业机器人晚于美国和日本,起于 20 世纪 70 年代,早期是...