从 APA 到 AVP,四代泊车辅助系统技术剖析前言在汽车智能化的浪潮中,车载传感器发展迅速,越来越多搭载了先进传感器的汽车进入了我们的视野
比如能够在高速公路上实现单车道巡航的凯迪拉克 CT6,以及交通严重拥堵时解放驾驶员时间的奥迪 A8,以及能够轻松实现高速公路自动驾驶、上下匝道的特斯拉 Model 系列的车型
公众对自动驾驶的认识主要集中在高速、环路,解决的是“开车”的问题
其实自动驾驶技术除了能开得一手好车外,还可以帮助解决新老司机都比较头痛的停车问题
泊车辅助系统目前已经发展至第三代,从最开始的驾驶员必须在车内配合挂挡完成泊车,发展到驾驶员可以站在车外 5 米使用手机控制泊车,最后到汽车自己学习泊车路线,完成固定停车位或自家车库的泊车
下面,我就来盘点一下已经成熟的这三代泊车辅助系统的传感器配置以及典型的应用场景,随后我会对将在一两年内量产的第四代泊车辅助系统做一个技术分析
目前市面上已量产的泊车辅助系统主要有三类
最早普及也是最为常见的第一代叫做 APA 自动泊车,随后出现的是将泊车与手机结合的第二代 RPA 远程遥控泊车,最后是最先进的第三代叫做自学习泊车
在未来一到两年内将会出现更为先进的泊车解决方案——AVP 代客泊车,也就是暂未量产的第四代泊车辅助系统
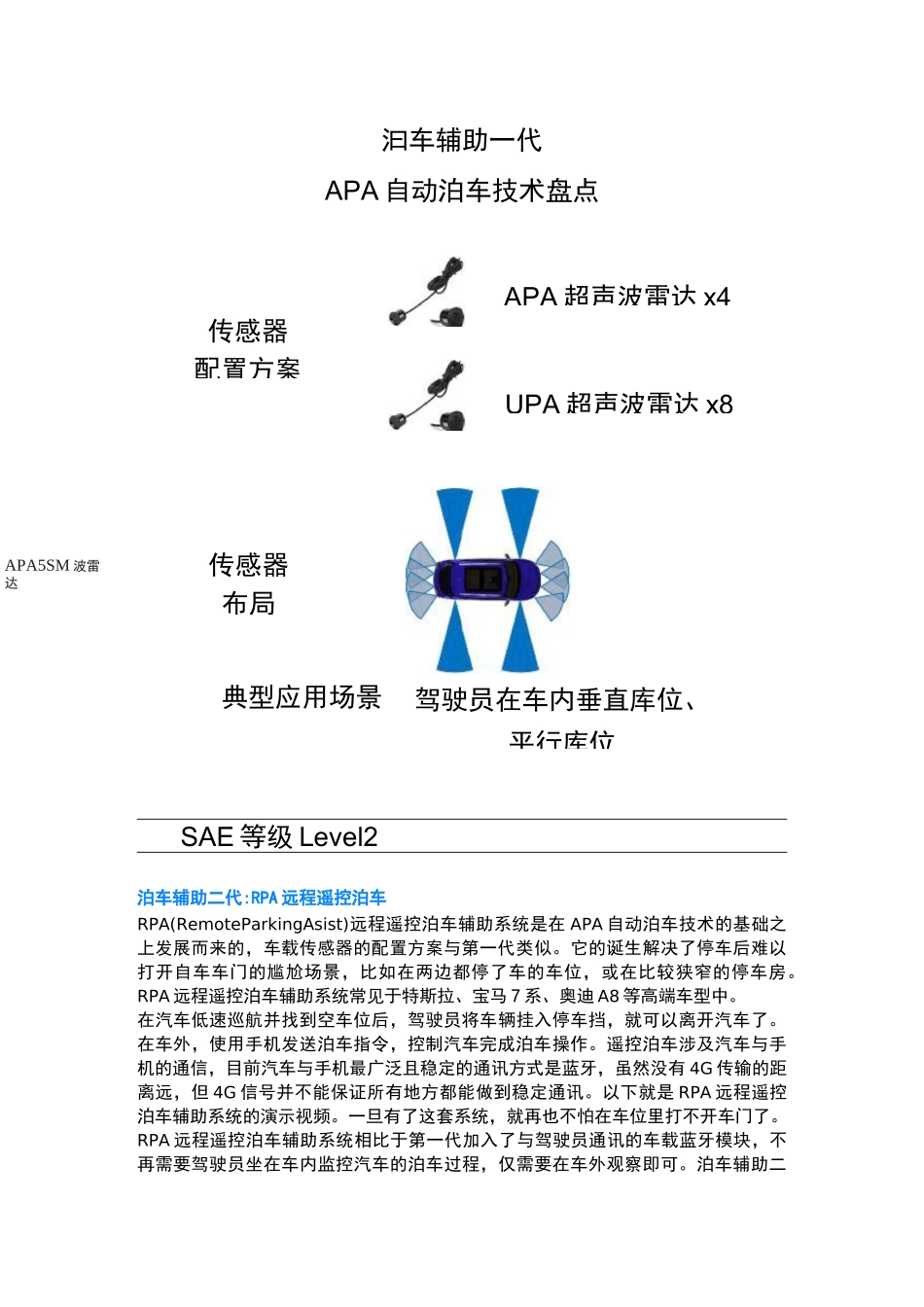
泊车辅助一代:APA 自动泊车APA(AutoParkingAsist)自动泊车是生活中最常见的泊车辅助系统
泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位
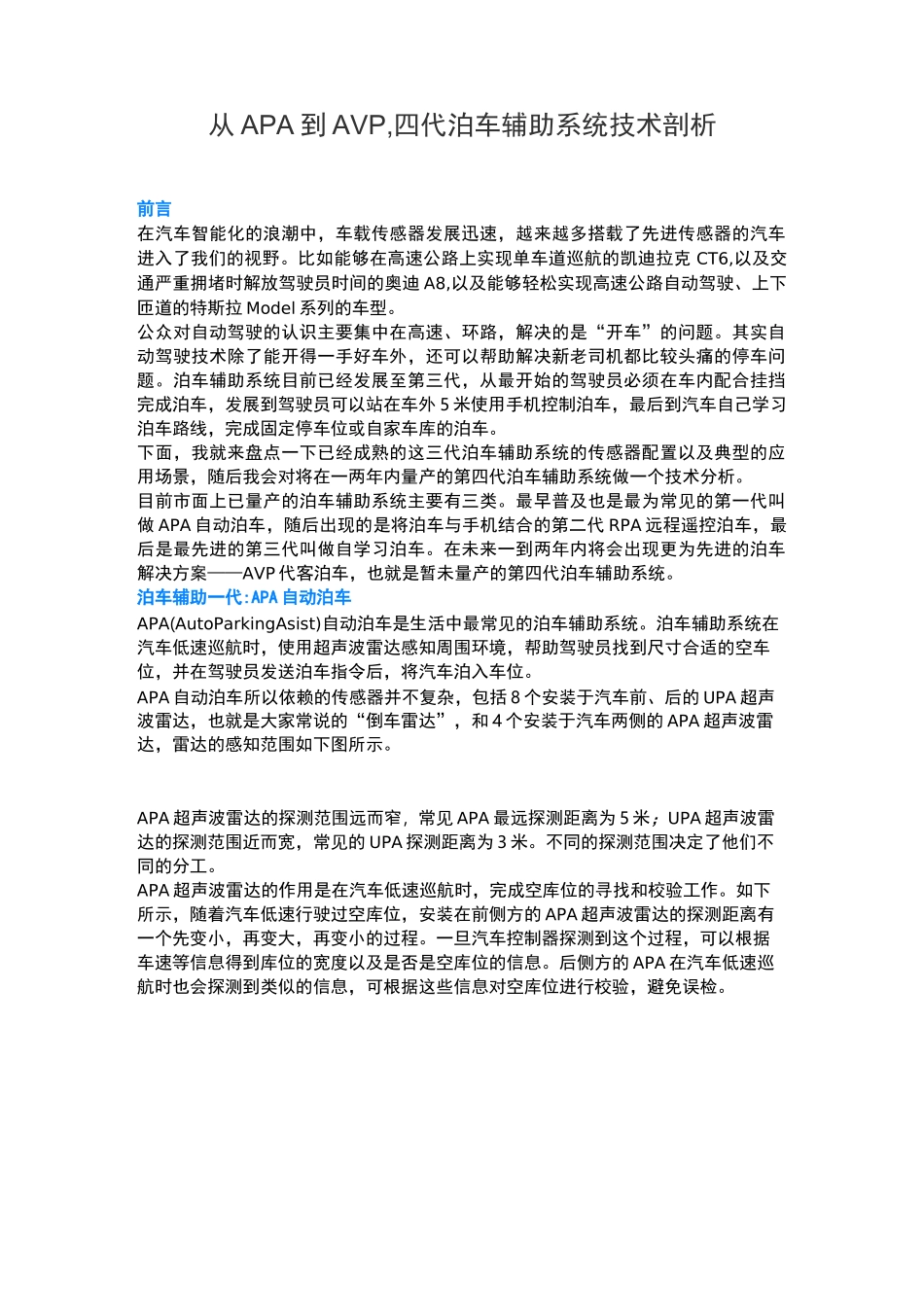
APA 自动泊车所以依赖的传感器并不复杂,包括 8 个安装于汽车前、后的 UPA 超声波雷达,也就是大家常说的“倒车雷达”,和 4 个安装于汽车两侧的 APA 超声波雷达,雷达的感知范围如下图所示
APA 超声波雷达的探测范围远而窄,常见 APA 最远探测距离为 5