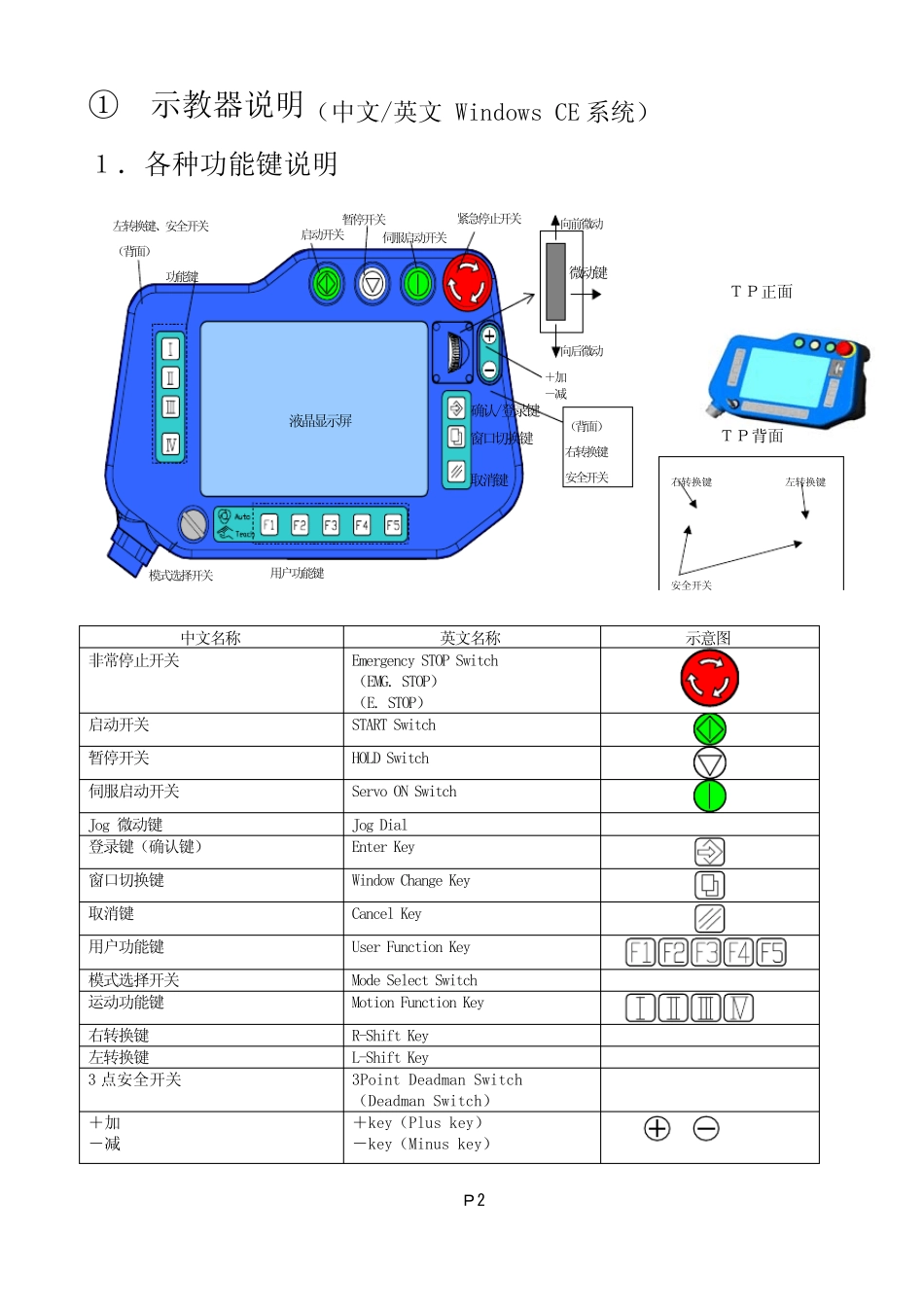
松下产业用机器人 机器人系统中心 GⅡ控制器基本操作 卷 (标准) YA-1NA 系列 唐山松下产业机器有限公司 机器人系统中心 P 1 - 目 录 - 示教器说明 ・各种功能键说明 2 ・如何正确使用示教器 3 ① ・ID设定 4 ② 机器人手动运转操作 ・如何进行操作 5 ・机器人运动 6-7 ・微动量的设定 7 ・暂停・紧急停止 7 ③ 示教操作(新程序的创建) ・示教的速度 8 ・如何进入示教模式・如何登录示教点 9 ・示教点登录界面 10 ・退出当前示教模式 11 ・示教操作时功能键的使用 11 ・示教的详细设定 12 ・示教时的扩张机能设定 12 ④ 文件(程序)的检查・ 修正(跟踪) ・当前所示教程序的跟踪・修正 13 ・所选择程序跟踪・修正 14 ・退出当前检查・修正操作 15 ・程序跟踪时对示教点的操作(添加・变更・删除) 16-17 ・退出示教模式・返回视窗界面 18 ・示教速度的变更 18 ⑤ 圆弧的示教 ・圆弧插补(正确的示教方法・不正确的示教方法) 19 ⑥ 摆动运动的示教 ・示教方法 20-21 ・摆动开始点・跟踪前后动作 22 ・摆动运动示教点的删除・以及不完全删除后的运动 23 ・摆动运动条件的限制 23 ⑦ 焊接区间的定义 ・焊接开始点・中间点・结束点的命令 24 ⑧ 编辑操作 ・打开/关闭文件(程序) 25 ・操作注意点 26 ・命令的变更(ARC-SET,ARC-ON)・命令的删除 27 ・命令的追加(输入ON,OFF,等待输入) 28 ・命令的追加(等待时间),变更(等待时间) 29 ・输入数值的变更 30 ・使用MDI操作进行位置修正 30 ・ 示教点的序号重新排序 ・ 置换操作(焊接条件・速度的成批替换) 31 31 ⑨ 运转 ・ 启动方式 ・ 送丝/气体检查 ・ 运转条件限制 32 32 32 ・运转中示教点的修正 33 ⑩ 示