第5章轮系§5-1轮系的类型§5-2定轴轮系及其传动比§5-3周转轮系及其传动比§5-4复合轮系及其传动比§5-5轮系的应用§5-1轮系的类型由一系列齿轮组成的传动系统称为轮系
轮系可分为定轴轮系和周转轮系
–在运转过程中,各轮几何轴线的位置相对于机架是固定不动的轮系称为定轴轮系,如图所示
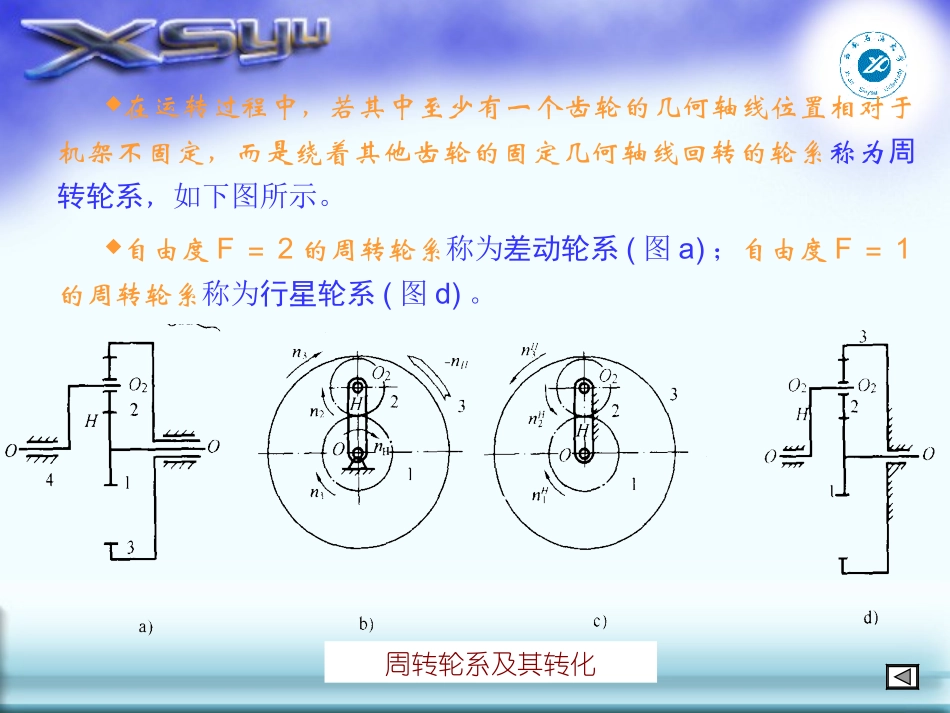
定轴轮系在运转过程中,若其中至少有一个齿轮的几何轴线位置相对于机架不固定,而是绕着其他齿轮的固定几何轴线回转的轮系称为周转轮系,如下图所示
自由度F=2的周转轮系称为差动轮系(图a);自由度F=1的周转轮系称为行星轮系(图d)
周转轮系及其转化§5-2定轴轮系及其传动比轮系传动比————轮系中首、末两构件的角速度之比
计算时,要确定其传动比的大小和首末两构件的转向关系
定轴轮系各轮的相对转向用画箭头方法在图中表示,箭头方向表明齿轮可见齿面圆周速度方向,如图所示
定轴轮系的传动比等于该轮系中各齿轮副传动比的连乘积;也等于各对啮合齿轮中从动轮齿数的连乘积与各对啮合齿轮中主动轮齿数的连乘积之比
即)15(1111积间所有主动轮齿数的乘至轮轮积间所有从动轮齿数的乘至轮轮KKnniKK如右图所示轮系由7个齿轮组成,形成4对齿轮啮合
已知各轮齿数,传动比i15为:'45'3423125'44'332215'44'323125115zzzzzzzznnnnnnnniiiinni当首轮与末轮的轴线平行时,可以在传动比数值前冠以正、负号,表示转向与首轮转向相同或相反
对由圆柱齿轮组成的平面定轴轮系部分,由于内啮合时齿轮的转动方向相同,而每经过一次外啮合齿轮转向改变一次,若有m次外齿合,其转向就改变几次,因此可用(-1)m来确定传动比前的“+”、“-”号
如上图所示轮系中由齿轮1至齿轮4间的传动比可表示为&#