一、实验原理: 避障传感器基本原理,和循迹传感器工作原理基本相同,利用物体的反射性质
在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失
如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头
传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调小车两轮工作,完成一个漂亮的躲避障碍物动作,传感器原理图如图6
图6 红外避障传感器原理图 1、把红外避障传感器固定在小车的正前方,接好线
注意:红外传感器的避障距离也是可调,调节滑动变阻器可以调节避障距离
2、编制程序,实现小车检测到前方有障碍物时,向左转弯,再检测,没有障碍物,继续前进,有障碍物,继续左转弯
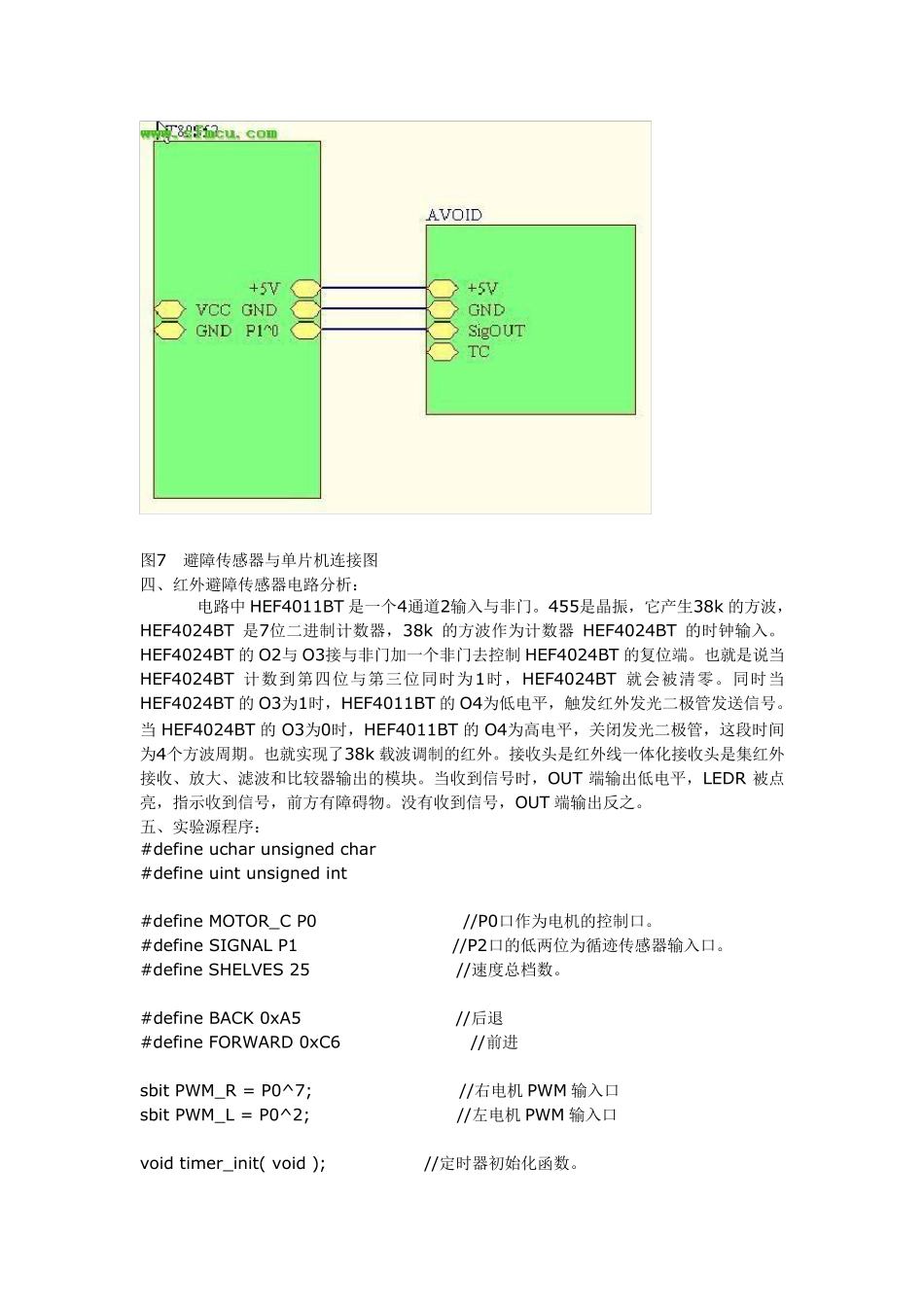
图7 避障传感器与单片机连接图 四、红外避障传感器电路分析: 电路中 HEF4011BT 是一个4通道2输入与非门
455是晶振,它产生38k 的方波,HEF4024BT 是7位二进制计数器,38k 的方波作为计数器HEF4024BT 的时钟输入
HEF4024BT 的 O2与O3接与非门加一个非门去控制 HEF4024BT 的复位端
也就是说当HEF4024BT 计数到第四位与第三位同时为1时,HEF4024BT 就会被清零
同时当HEF4024BT 的 O3为1时,HEF4011BT 的 O4为低电平,触发红外发光二极管发送信号
当 HEF4024BT 的 O3为0时,HEF4011BT 的 O4为高电平,关闭发光二极管,这段时间为4个方波周期
也就实现了38k 载波调制的红外
接收头是红外线一体化接收头是集红外接收、放大、滤波和比较器输出的模块
当收到信号时,OUT 端输出低电平,LEDR 被点亮,指示收到信号,前方有障碍物
没有收到信号,OUT 端输出反之
五、实验源程序: #define uchar unsigned char #d